
lobot/Robolocust controller. More...
#include "Robots/LoBot/LoApp.H"#include "Robots/LoBot/thread/LoShutdown.H"#include "Robots/LoBot/thread/LoUpdateLock.H"#include "Robots/LoBot/thread/LoThread.H"#include "Robots/LoBot/misc/LoExcept.H"#include "Util/log.H"#include <stdexcept>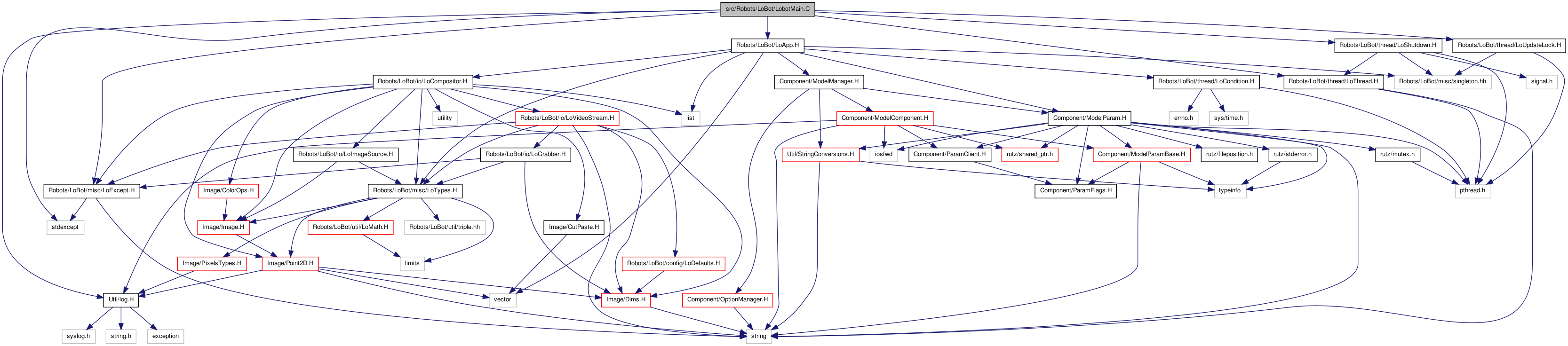
Go to the source code of this file.
Functions | |
| int | main (int argc, const char *argv[]) |
lobot/Robolocust controller.
This file defines the main function for the Robolocust controller. The goal of the Robolocust project is to design and implement a robot that avoids obstacles based on a model of the Lobula Giant Movement Detector (LGMD) found in locust brains.
The LGMD is a visual interneuron that responds with increasing frequency to stimuli on a direct collision course with the locust. For the Robolocust project, we want to use a computational model of this neuron to develop a collision sensor that can then be applied to the problem of robotic obstacle avoidance. Additionally, we also want to hook up actual locusts to the robot, tap into their LGMDs and use the spikes directly to be able to avoid obstacles.
To be able to perform the above-mentioned tasks, we need to have algorithms in place to integrate the LGMD spikes from multiple (real or virtual) locusts so as to produce a coherent steering decision for the robot. The lobot controller is designed to be a software framework for this purpose.
In terms of hardware, this framework has the ability to interface with FireWire cameras, a laser range finder and different robot platforms (e.g., the iRobot Create). For high-level control aspects, it provides a behaviour-based substrate built atop an implementation of the Distributed Architecture for Mobile Navigation (DAMN). Moreover, the framework provides for a configuration file that can be used to change almost any aspect of the program. This allows us to develop, test and compare many different LGMD models and integration algorithms.
Definition in file LobotMain.C.
 1.6.3
1.6.3