Edge Class Reference
#include <Beobot/Edge.H>
List of all members.
Detailed Description
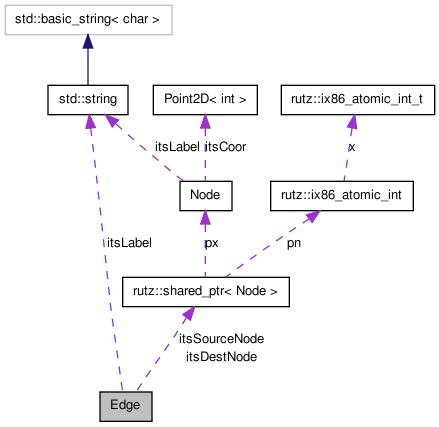
basic edge in a graph class the label is for display only, not necessary note its directionality is decided by the graph despite the label source and destination node
Definition at line 53 of file Edge.H.
Constructor & Destructor Documentation
Constructor: generate a blank edge (no end-nodes).
Definition at line 40 of file Edge.C.
Constructor: generate a directed edge with two nodes.
Definition at line 48 of file Edge.C.
Destructor.
Definition at line 59 of file Edge.C.
Member Function Documentation
| float Edge::getCost |
( |
|
) |
[inline] |
cost of traversing the edge default: 1.0
Definition at line 107 of file Edge.H.
get the destination node
Definition at line 122 of file Edge.H.
get the label of the edge
Definition at line 137 of file Edge.H.
get the source node
Definition at line 117 of file Edge.H.
| void Edge::setCost |
( |
float |
cost |
) |
[inline] |
set the cost of the edge
Definition at line 112 of file Edge.H.
set the destination node
Definition at line 132 of file Edge.H.
set the source node
Definition at line 127 of file Edge.H.
The documentation for this class was generated from the following files:

 1.6.3
1.6.3