
#include "Beobot/BeobotControl.H"#include "Component/OptionManager.H"#include "Util/Types.H"#include "Util/log.H"#include <math.h>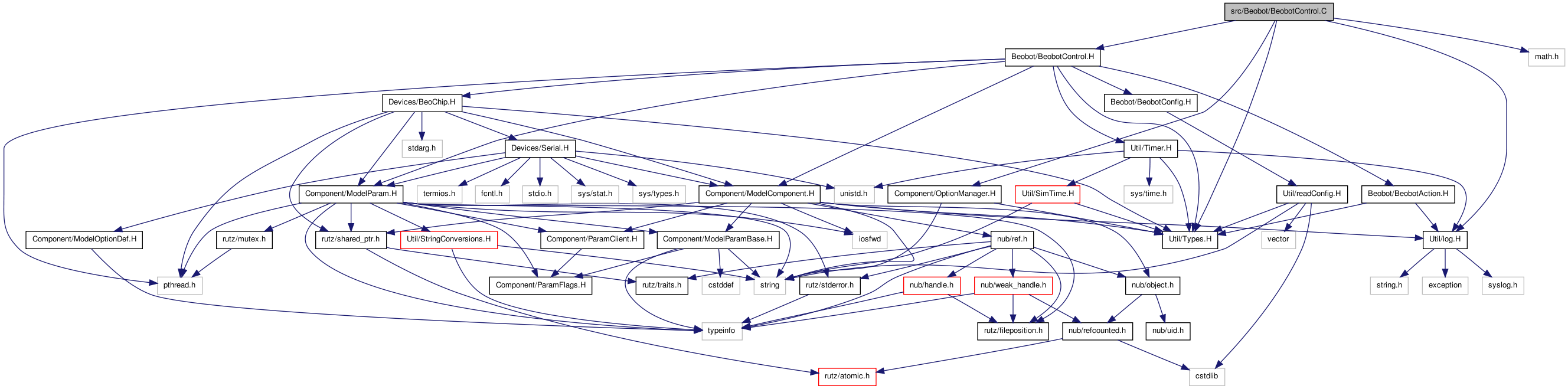
Go to the source code of this file.
Defines | |
| #define | MAX_SERVO_MOVE .10 |
Functions | |
| void * | speedRampFunc (void *ptr) |
control the movement of the Beobot (via BeoChip)
Definition in file BeobotControl.C.
 1.6.3
1.6.3