
#include "Envision/env_channel.h"#include "Envision/env_c_math_ops.h"#include "Envision/env_image_ops.h"#include "Envision/env_log.h"#include "Envision/env_params.h"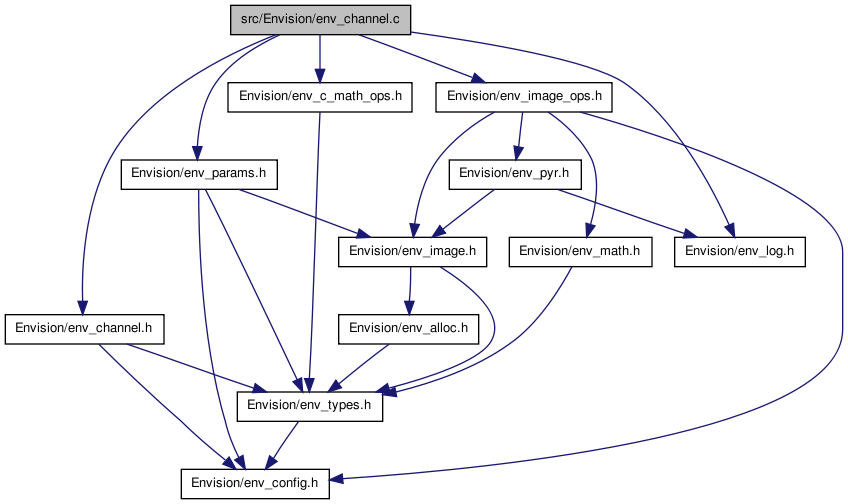
Go to the source code of this file.
Functions | |
| static int | is_dyadic (const struct env_pyr *pyr, const env_size_t first, const env_size_t last) |
| Check whether the pyramid is dyadic. | |
| void | env_chan_process_pyr (const char *tagName, const struct env_dims inputDims, const struct env_pyr *pyr, const struct env_params *envp, const struct env_math *imath, const int takeAbs, const int normalizeOutput, struct env_image *result) |
| void | env_chan_intensity (const char *tagName, const struct env_params *envp, const struct env_math *imath, const struct env_dims inputdims, const struct env_pyr *lowpass5, const int normalizeOutput, env_chan_status_func *status_func, void *status_userdata, struct env_image *result) |
| An intensity channel. | |
| void | env_chan_color (const char *tagName, const struct env_params *envp, const struct env_math *imath, const struct env_rgb_pixel *const colimg, const struct env_rgb_pixel *const prev_colimg, const struct env_dims dims, env_chan_status_func *status_func, void *status_userdata, struct env_image *result) |
| A double opponent color channel that combines r/g, b/y subchannels. | |
| void | env_chan_steerable (const char *tagName, const struct env_params *envp, const struct env_math *imath, const struct env_dims inputdims, const struct env_pyr *hipass9, const env_size_t thetaidx, env_chan_status_func *status_func, void *status_userdata, struct env_image *result) |
| An orientation filtering channel. | |
| void | env_chan_orientation (const char *tagName, const struct env_params *envp, const struct env_math *imath, const struct env_image *img, env_chan_status_func *status_func, void *status_userdata, struct env_image *result) |
| A composite channel with a set of steerable-filter subchannels. | |
Base class for channels that will use integer math
Definition in file env_channel.c.
| void env_chan_color | ( | const char * | tagName, | |
| const struct env_params * | envp, | |||
| const struct env_math * | imath, | |||
| const struct env_rgb_pixel *const | colimg, | |||
| const struct env_rgb_pixel *const | prev_colimg, | |||
| const struct env_dims | dims, | |||
| env_chan_status_func * | status_func, | |||
| void * | status_userdata, | |||
| struct env_image * | result | |||
| ) |
A double opponent color channel that combines r/g, b/y subchannels.
Definition at line 278 of file env_channel.c.
References env_chan_intensity(), env_get_rgby(), env_img_size(), env_pyr_build_lowpass_5(), env_pyr_init(), env_dims::h, and env_dims::w.
| void env_chan_intensity | ( | const char * | tagName, | |
| const struct env_params * | envp, | |||
| const struct env_math * | imath, | |||
| const struct env_dims | inputdims, | |||
| const struct env_pyr * | lowpass5, | |||
| const int | normalizeOutput, | |||
| env_chan_status_func * | status_func, | |||
| void * | status_userdata, | |||
| struct env_image * | result | |||
| ) |
| void env_chan_orientation | ( | const char * | tagName, | |
| const struct env_params * | envp, | |||
| const struct env_math * | imath, | |||
| const struct env_image * | img, | |||
| env_chan_status_func * | status_func, | |||
| void * | status_userdata, | |||
| struct env_image * | result | |||
| ) |
A composite channel with a set of steerable-filter subchannels.
Definition at line 384 of file env_channel.c.
References env_c_image_div_scalar(), env_c_image_div_scalar_accum(), env_chan_steerable(), env_img_initialized(), env_img_size(), env_pyr_init(), and env_params::num_orientations.
| void env_chan_steerable | ( | const char * | tagName, | |
| const struct env_params * | envp, | |||
| const struct env_math * | imath, | |||
| const struct env_dims | inputdims, | |||
| const struct env_pyr * | hipass9, | |||
| const env_size_t | thetaidx, | |||
| env_chan_status_func * | status_func, | |||
| void * | status_userdata, | |||
| struct env_image * | result | |||
| ) |
An orientation filtering channel.
Definition at line 343 of file env_channel.c.
Referenced by env_chan_orientation().
| static int is_dyadic | ( | const struct env_pyr * | pyr, | |
| const env_size_t | first, | |||
| const env_size_t | last | |||
| ) | [static] |
Check whether the pyramid is dyadic.
A dyadic pyramid is one in which each level is one half the width and one half the height of the preceding level.
Definition at line 53 of file env_channel.c.
References env_pyr_img(), env_dims::h, and env_dims::w.
 1.6.3
1.6.3