
Public Member Functions | |
| IRobotI (int debug=1) | |
| virtual float | getSpeed (const Ice::Current &) |
| virtual short | setSpeed (const float speed, const Ice::Current &) |
| virtual float | getSteering (const Ice::Current &) |
| virtual short | setSteering (const float steeringPos, const Ice::Current &) |
| virtual ImageIceMod::ImageIce | getImageSensor (const short i, const bool useColor, const Ice::Current &) |
| virtual ImageIceMod::DimsIce | getImageSensorDims (const short i, const Ice::Current &) |
| virtual float | getSensorValue (const short i, const Ice::Current &) |
| virtual void | motorsOff (const short i, const Ice::Current &) |
| virtual void | setMotor (const short i, const float val, const Ice::Current &) |
| virtual short | sendRawCmd (const std::string &data, const Ice::Current &) |
| virtual void | playSong (const short song, const Ice::Current &) |
| virtual void | shutdown (const Ice::Current &) |
| virtual void | sendStart (const Ice::Current &) |
| virtual void | setMode (const Robots::IRobotModes demo, const Ice::Current &) |
| virtual void | setDemo (const short demo, const Ice::Current &) |
| virtual void | setLED (const short led, const short color, const short intensity, const Ice::Current &) |
| virtual bool | getSensors (float &xPos, float &yPos, float &ori, const Ice::Current &) |
| virtual bool | getDistanceAngle (float &dist, float &ang, const Ice::Current &) |
| void | sendDriveCommand () |
| Send the command to drive the robot. | |
| void | sendDirectDriveCommand () |
| Send the command to direct drive the robot. | |
| IRobotI (ModelManager &mgr, nub::soft_ref< OutputFrameSeries > ofs, const std::string &descrName="IRobotSimService", const std::string &tagName="IRobotSimService") | |
| virtual void | run () |
| virtual float | getSpeed (const Ice::Current &) |
| virtual short | setSpeed (const float speed, const Ice::Current &) |
| virtual float | getSteering (const Ice::Current &) |
| virtual short | setSteering (const float steeringPos, const Ice::Current &) |
| virtual ImageIceMod::ImageIce | getImageSensor (const short i, bool color, const Ice::Current &) |
| virtual ImageIceMod::DimsIce | getImageSensorDims (const short i, const Ice::Current &) |
| virtual float | getSensorValue (const short i, const Ice::Current &) |
| virtual bool | getSensors (float &xPos, float &yPos, float &ori, const Ice::Current &) |
| virtual bool | getDistanceAngle (float &dist, float &ang, const Ice::Current &) |
| virtual void | motorsOff (const short i, const Ice::Current &) |
| virtual void | setMotor (const short i, const float val, const Ice::Current &) |
| virtual short | sendRawCmd (const std::string &data, const Ice::Current &) |
| virtual void | playSong (const short song, const Ice::Current &) |
| virtual void | shutdown (const Ice::Current &) |
| virtual void | sendStart (const Ice::Current &) |
| virtual void | setMode (const Robots::IRobotModes demo, const Ice::Current &) |
| virtual void | setDemo (const short demo, const Ice::Current &) |
| virtual void | setLED (const short led, const short color, const short intensity, const Ice::Current &) |
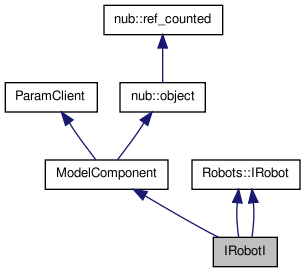
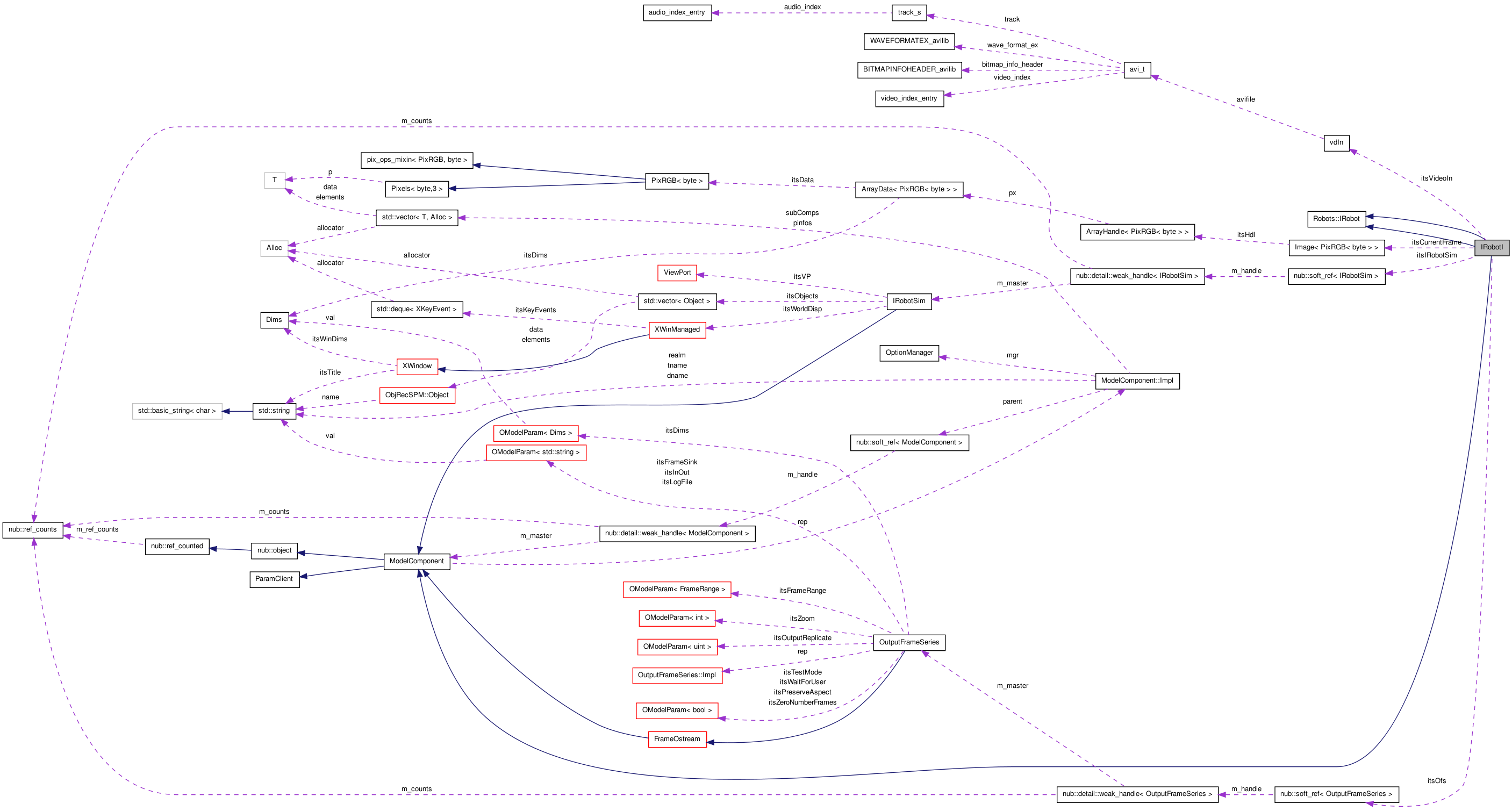
Definition at line 63 of file IRobotI.h.
| void IRobotI::sendDirectDriveCommand | ( | ) |
Send the command to direct drive the robot.
Definition at line 234 of file IRobotI.cpp.
| void IRobotI::sendDriveCommand | ( | ) |
Send the command to drive the robot.
Definition at line 205 of file IRobotI.cpp.
 1.6.3
1.6.3