
Trivial saccade controller. More...
#include <Neuro/SaccadeControllers.H>
Public Member Functions | |
| TrivialSaccadeController (OptionManager &mgr, const SaccadeBodyPart bodypart) | |
| Constructor. | |
| virtual | ~TrivialSaccadeController () |
| Destructor. | |
Protected Member Functions | |
| virtual void | doEvolve (SimEventQueue &q) |
| evolve one time step | |
| virtual void | computeWhenNewPercept (SimEventQueue &q) |
| This method is called each time a new percept has arrived. | |
| virtual void | computeWhenResetPos (SimEventQueue &q) |
| This method is called each time a reset is made. | |
| virtual Point2D< int > | computeWhenNewDecision (SaccadeState &sacstate, bool &blinkstate, SimEventQueue &q) |
| This method is called each time a new decision is requested. | |
Protected Attributes | |
| OModelParam< float > | itsMinSacLen |
| Minimum saccade len. | |
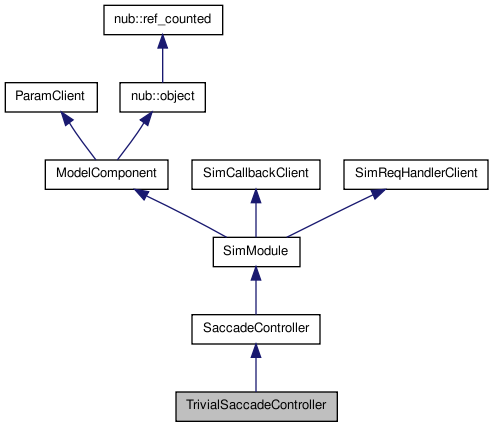
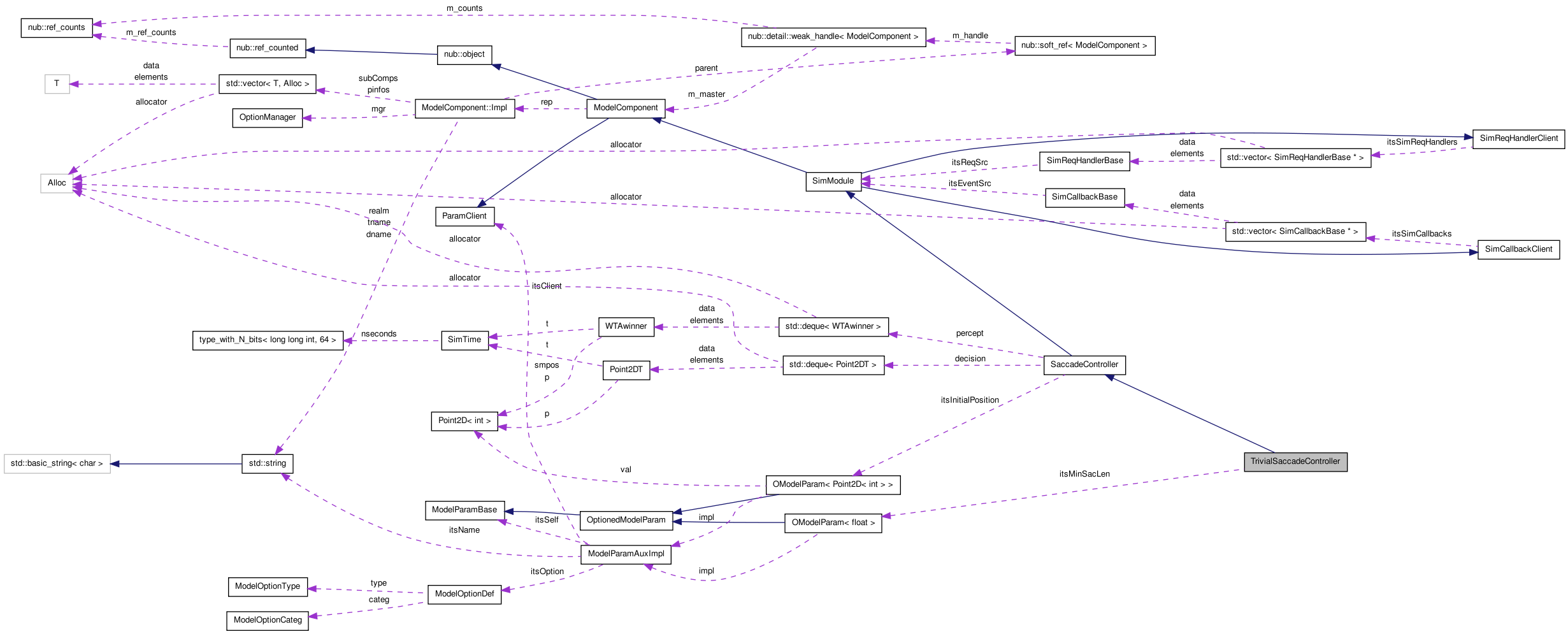
Trivial saccade controller.
TrivialSaccadeController is a direct mapping from percept to decision.
Definition at line 83 of file SaccadeControllers.H.
| TrivialSaccadeController::TrivialSaccadeController | ( | OptionManager & | mgr, | |
| const SaccadeBodyPart | bodypart | |||
| ) |
Constructor.
Definition at line 95 of file SaccadeControllers.C.
| TrivialSaccadeController::~TrivialSaccadeController | ( | ) | [virtual] |
Destructor.
Definition at line 105 of file SaccadeControllers.C.
| Point2D< int > TrivialSaccadeController::computeWhenNewDecision | ( | SaccadeState & | sacstate, | |
| bool & | blinkstate, | |||
| SimEventQueue & | q | |||
| ) | [protected, virtual] |
This method is called each time a new decision is requested.
Implements SaccadeController.
Definition at line 122 of file SaccadeControllers.C.
References Point2D< T >::distance(), SaccadeController::getPreviousDecision(), SaccadeController::getPreviousPercept(), OModelParam< T >::getVal(), Point2D< T >::isValid(), itsMinSacLen, Point2DT::p, WTAwinner::p, SACSTATE_FIX, SACSTATE_SAC, and SACSTATE_UNK.
| void TrivialSaccadeController::computeWhenNewPercept | ( | SimEventQueue & | q | ) | [protected, virtual] |
This method is called each time a new percept has arrived.
Implements SaccadeController.
Definition at line 113 of file SaccadeControllers.C.
| void TrivialSaccadeController::computeWhenResetPos | ( | SimEventQueue & | q | ) | [protected, virtual] |
This method is called each time a reset is made.
Implements SaccadeController.
Definition at line 117 of file SaccadeControllers.C.
| void TrivialSaccadeController::doEvolve | ( | SimEventQueue & | q | ) | [protected, virtual] |
evolve one time step
Implements SaccadeController.
Definition at line 109 of file SaccadeControllers.C.
OModelParam<float> TrivialSaccadeController::itsMinSacLen [protected] |
Minimum saccade len.
Definition at line 93 of file SaccadeControllers.H.
Referenced by computeWhenNewDecision().
 1.6.3
1.6.3