
Public Member Functions | |
Constructors and Destructors | |
| Beobot2_GistSalLocalizerMasterI (OptionManager &mgr, const std::string &descrName="Beobot2_GistSalLocalizerMaster", const std::string &tagName="Beobot2_GistSalLocalizerMaster") | |
| ~Beobot2_GistSalLocalizerMasterI () | |
| virtual void | start1 () |
| Get started. See ModelComponent. | |
| virtual void | evolve () |
| Evolve: Gets called by run in a while(1) loop. Anything that you want to happen continuously should go in here. | |
| virtual void | updateMessage (const RobotSimEvents::EventMessagePtr &eMsg, const Ice::Current &) |
| Get a message. | |
| virtual void | registerTopics () |
| and registerPublisher calls that you would like to happen automatically after init. | |
| void | setEnvironment (rutz::shared_ptr< Environment > env) |
| set the environment - has to be done | |
member functions | |
| void | initParticles (std::string belFName=std::string("")) |
| initialize the localization particles | |
| void | input () |
| rutz::shared_ptr< Histogram > | getSegmentBeliefHistogram () |
| the belief histogram for segment only localization | |
| void | updateBelief () |
| void | actionUpdateBelief () |
| move the object from the previous location | |
| void | segmentUpdateBelief () |
| update belief using the segment prediction | |
| void | objectUpdateBelief () |
| update belief using all the objects found | |
| void | objectUpdateBelief (uint index) |
| update belief using object 'index' | |
| void | setLocation () |
| set the most likely location | |
| void | saveLocalizerResults () |
| save the localizer results | |
| Image< PixRGB< byte > > | getBeliefImage (uint w, uint h, int &scale) |
| get the belief image (it is put on top of a map) | |
| Image< PixRGB< byte > > | getDisplayImage () |
| Image< PixRGB< byte > > | getSalImage (Image< PixRGB< byte > > ima, std::vector< rutz::shared_ptr< VisualObject > > inputVO, std::vector< Point2D< int > > objOffset, std::vector< bool > found) |
| void | setNumWorkers (uint numWorkers) |
| void | setSavePrefix (std::string prefix) |
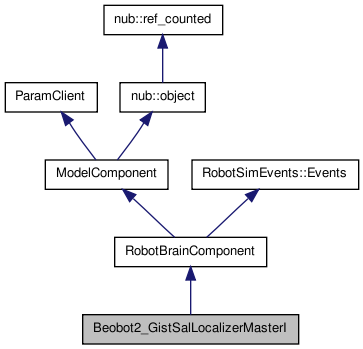
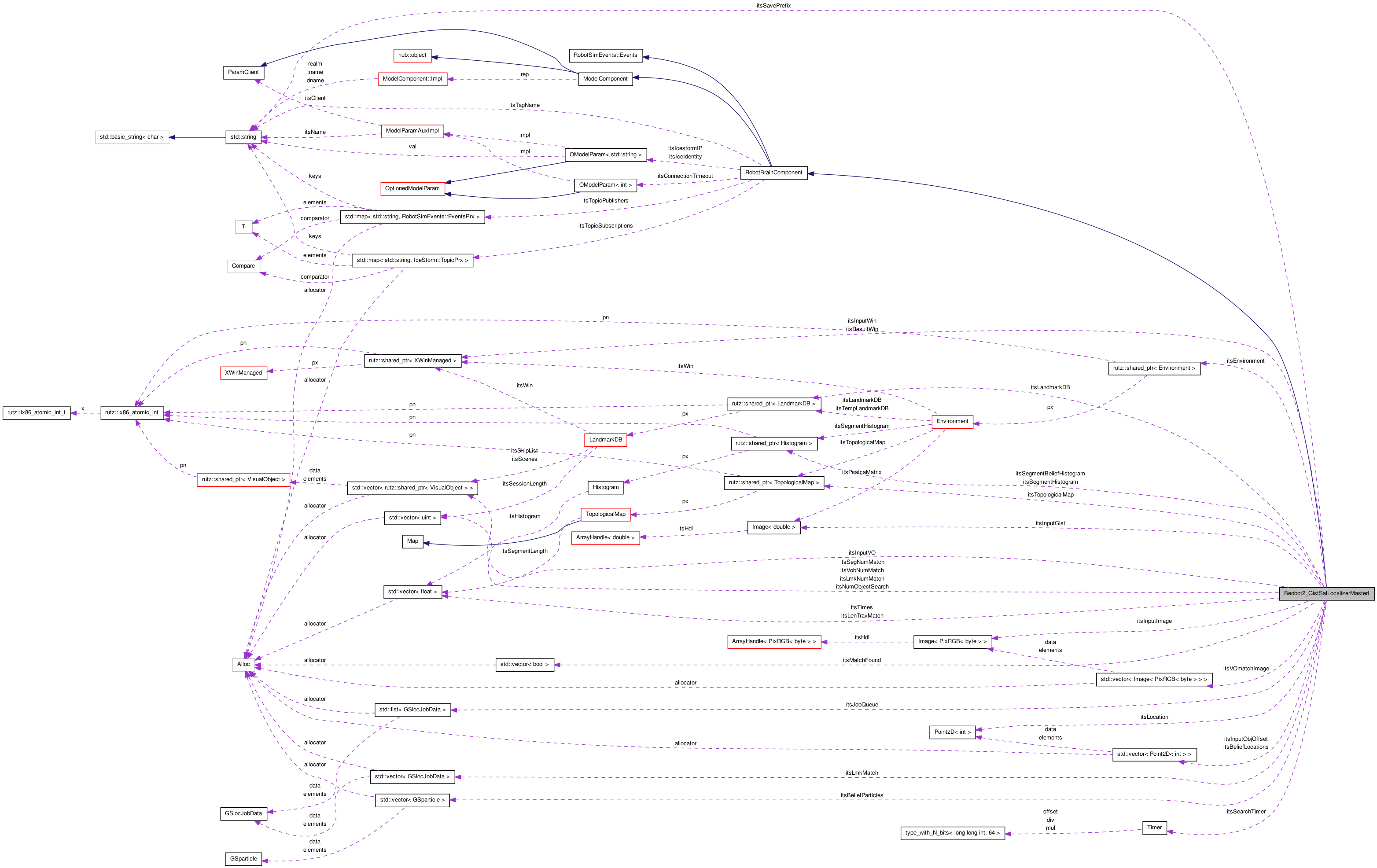
Definition at line 59 of file Beobot2_GistSalLocalizerMaster.H.
| void Beobot2_GistSalLocalizerMasterI::actionUpdateBelief | ( | ) |
move the object from the previous location
Definition at line 1068 of file Beobot2_GistSalLocalizerMaster.C.
| void Beobot2_GistSalLocalizerMasterI::evolve | ( | ) | [virtual] |
Evolve: Gets called by run in a while(1) loop. Anything that you want to happen continuously should go in here.
Reimplemented from RobotBrainComponent.
Definition at line 134 of file Beobot2_GistSalLocalizerMaster.C.
| Image< PixRGB< byte > > Beobot2_GistSalLocalizerMasterI::getBeliefImage | ( | uint | w, | |
| uint | h, | |||
| int & | scale | |||
| ) |
get the belief image (it is put on top of a map)
Definition at line 1505 of file Beobot2_GistSalLocalizerMaster.C.
References drawCircle(), drawDisk(), flipHoriz(), Image< T >::getHeight(), getSegmentBeliefHistogram(), Image< T >::getWidth(), Point2D< T >::i, inplacePaste(), transpose(), Dims::w(), and ZEROS.
| rutz::shared_ptr< Histogram > Beobot2_GistSalLocalizerMasterI::getSegmentBeliefHistogram | ( | ) |
the belief histogram for segment only localization
print the histogram profile
Definition at line 958 of file Beobot2_GistSalLocalizerMaster.C.
Referenced by getBeliefImage().
| void Beobot2_GistSalLocalizerMasterI::initParticles | ( | std::string | belFName = std::string("") |
) |
initialize the localization particles
Definition at line 630 of file Beobot2_GistSalLocalizerMaster.C.
References Point2D< T >::i, and Raster::waitForKey().
| void Beobot2_GistSalLocalizerMasterI::objectUpdateBelief | ( | uint | index | ) |
update belief using object 'index'
Definition at line 1314 of file Beobot2_GistSalLocalizerMaster.C.
References Point2D< T >::distance(), Dims::h(), sqrt(), and Dims::w().
| void Beobot2_GistSalLocalizerMasterI::objectUpdateBelief | ( | ) |
update belief using all the objects found
Definition at line 1197 of file Beobot2_GistSalLocalizerMaster.C.
References Point2D< T >::distance(), Dims::h(), sqrt(), and Dims::w().
| void Beobot2_GistSalLocalizerMasterI::registerTopics | ( | ) | [virtual] |
and registerPublisher calls that you would like to happen automatically after init.
Register Topics: This function is called at the end of init, and is virtual so that is can be overloaded by chid classes. In your overloaded version you should put all of the registerSubsciption
Reimplemented from RobotBrainComponent.
Definition at line 117 of file Beobot2_GistSalLocalizerMaster.C.
References RobotBrainComponent::registerPublisher(), and RobotBrainComponent::registerSubscription().
| void Beobot2_GistSalLocalizerMasterI::saveLocalizerResults | ( | ) |
save the localizer results
Definition at line 976 of file Beobot2_GistSalLocalizerMaster.C.
References sformat().
| void Beobot2_GistSalLocalizerMasterI::segmentUpdateBelief | ( | ) |
update belief using the segment prediction
Definition at line 1110 of file Beobot2_GistSalLocalizerMaster.C.
| void Beobot2_GistSalLocalizerMasterI::setEnvironment | ( | rutz::shared_ptr< Environment > | env | ) |
set the environment - has to be done
from its environment: topological map
from its environment: visual landmark database
Definition at line 612 of file Beobot2_GistSalLocalizerMaster.C.
| void Beobot2_GistSalLocalizerMasterI::setLocation | ( | ) |
set the most likely location
Definition at line 1419 of file Beobot2_GistSalLocalizerMaster.C.
References Point2D< T >::distance(), and Point2D< T >::i.
Referenced by updateBelief().
| void Beobot2_GistSalLocalizerMasterI::start1 | ( | ) | [virtual] |
Get started. See ModelComponent.
Reimplemented from ModelComponent.
Definition at line 103 of file Beobot2_GistSalLocalizerMaster.C.
References rutz::shared_ptr< T >::reset().
| void Beobot2_GistSalLocalizerMasterI::updateBelief | ( | ) |
update belief using the input just processed update our likely location
Definition at line 1061 of file Beobot2_GistSalLocalizerMaster.C.
References setLocation().
| void Beobot2_GistSalLocalizerMasterI::updateMessage | ( | const RobotSimEvents::EventMessagePtr & | eMsg, | |
| const Ice::Current & | ||||
| ) | [virtual] |
Get a message.
Reimplemented from RobotBrainComponent.
Definition at line 139 of file Beobot2_GistSalLocalizerMaster.C.
References Timer::get(), getMinMax(), hack(), Point2D< T >::i, mean(), NO_INIT, SEARCH_TIME_LIMIT, sformat(), stdev(), and Rectangle::tlbrO().
 1.6.3
1.6.3