
This class provides an abstract interface for a simulation viewer. More...
#include <Neuro/SimulationViewer.H>
Public Member Functions | |
Constructors and destructors | |
| SimulationViewer (OptionManager &mgr, const std::string &descrName="Simulation Viewer", const std::string &tagName="SimulationViewer") | |
| Constructor. See ModelComponent.H. | |
| virtual | ~SimulationViewer () |
| Destructor. | |
Protected Member Functions | |
| SIMCALLBACK_DECLARE (SimulationViewer, SimEventSceneDescription) | |
| Callback for when a new scene description is available. | |
| SIMCALLBACK_DECLARE (SimulationViewer, SimEventObjectDescription) | |
| Callback for when a new object description is available. | |
| Image< float > | getMap (SimEventQueue &q, const bool warn=true) const |
| Helper function to get the latest ''saliency map''. | |
| virtual Image< float > | inverseMap (const Image< float > &map_image) const |
| the map may be in non-cartesian coords, and an inverse may need to be applied | |
Protected Attributes | |
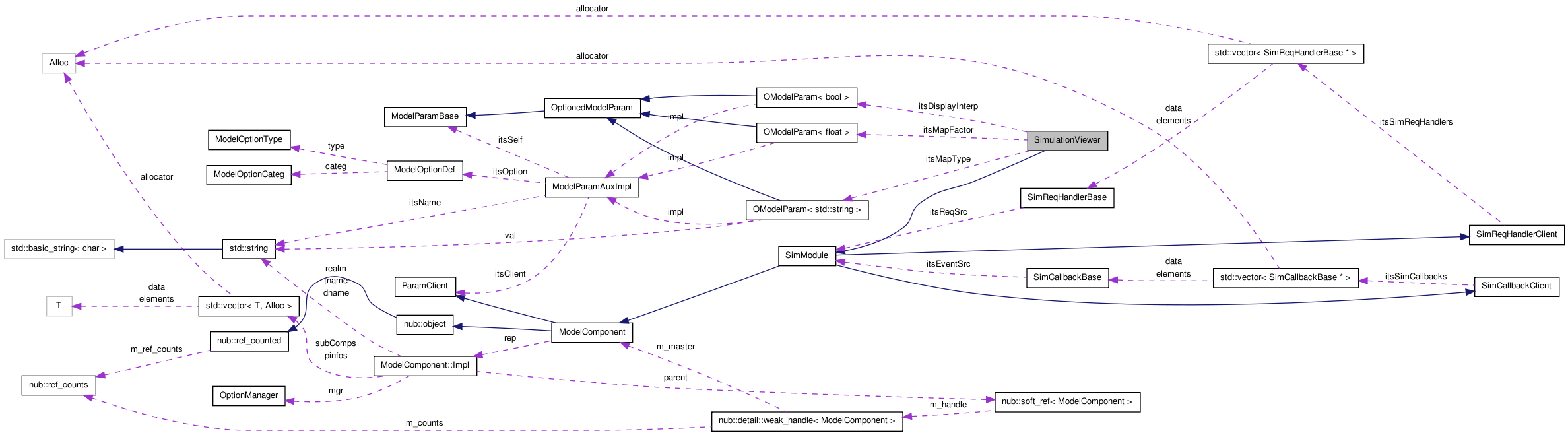
| OModelParam< bool > | itsDisplayInterp |
| use interpolation to display maps? | |
| OModelParam< float > | itsMapFactor |
| factor to use to display maps | |
| OModelParam< std::string > | itsMapType |
| type of map to use for displays | |
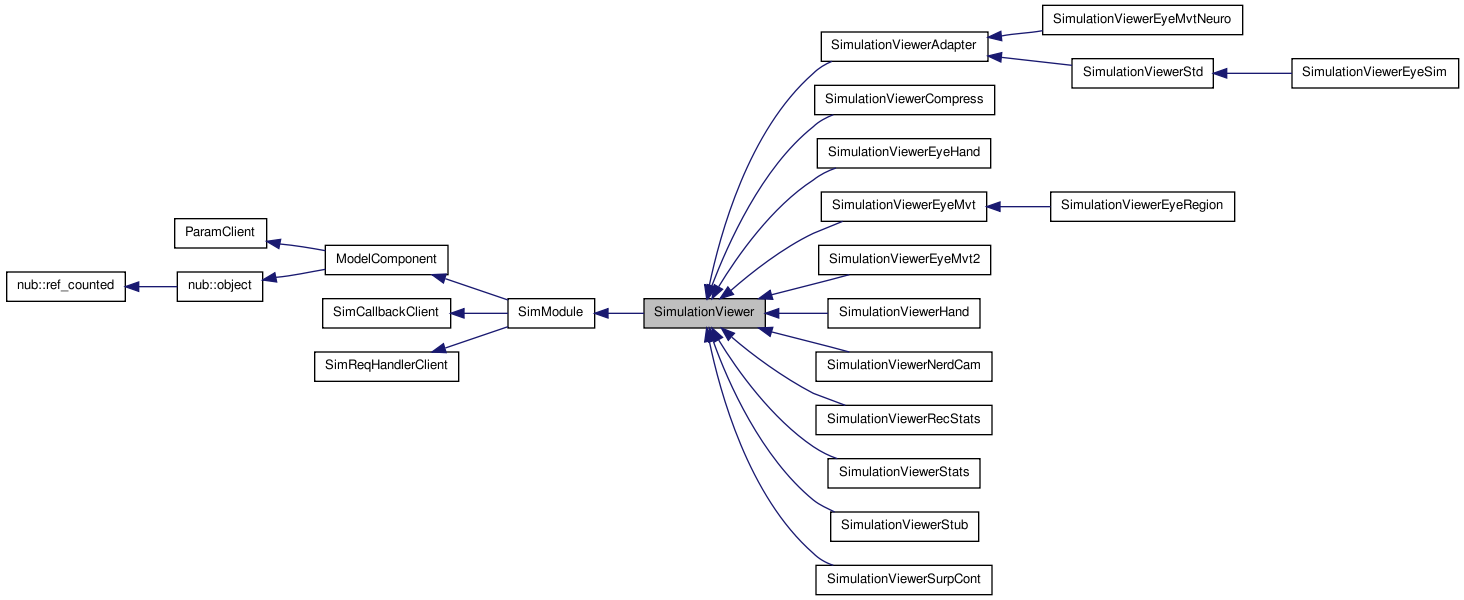
This class provides an abstract interface for a simulation viewer.
Its typical usage is with a model that generates shifts of attention, eye and head movements. Derivatives from this class will handle visualizing those events. See SimulationViewerStd.H for an example of such derivative. The base class described here just specifies the interface.
Definition at line 58 of file SimulationViewer.H.
| SimulationViewer::SimulationViewer | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "Simulation Viewer", |
|||
| const std::string & | tagName = "SimulationViewer" | |||
| ) |
Constructor. See ModelComponent.H.
| mgr | our ModelManager (see ModelManager.H) | |
| descrName | descriptive name for human usage | |
| tagName | name for ParamMap usage |
Definition at line 48 of file SimulationViewer.C.
| SimulationViewer::~SimulationViewer | ( | ) | [virtual] |
Destructor.
Definition at line 60 of file SimulationViewer.C.
| Image< float > SimulationViewer::getMap | ( | SimEventQueue & | q, | |
| const bool | warn = true | |||
| ) | const [protected] |
Helper function to get the latest ''saliency map''.
What is returned here could be SM, AGM, TRM, VCO, etc in normalized or un-normalized form, depending upon the values of itsMapFactor and itsMapType. If warn is true an error will be displayed if no suitable map is found in the event queue
Definition at line 78 of file SimulationViewer.C.
References SimEventQueue::check(), OModelParam< T >::getVal(), inverseMap(), itsMapFactor, itsMapType, and SEQ_ANY.
Referenced by SimulationViewerNerdCam::drawMegaCombo(), SimulationViewerStd::drawMegaCombo(), SimulationViewerEyeHand::getTraj(), SimulationViewerStd::getTraj(), SimulationViewerEyeRegion::getTraj(), SimulationViewerCompress::getTraj(), SimulationViewerEyeMvt::getTraj(), SimulationViewerStats::save1(), and SimulationViewerNerdCam::saveResults().
| virtual Image<float> SimulationViewer::inverseMap | ( | const Image< float > & | map_image | ) | const [inline, protected, virtual] |
the map may be in non-cartesian coords, and an inverse may need to be applied
Reimplemented in SimulationViewerAdapter.
Definition at line 96 of file SimulationViewer.H.
Referenced by getMap().
| SimulationViewer::SIMCALLBACK_DECLARE | ( | SimulationViewer | , | |
| SimEventObjectDescription | ||||
| ) | [protected] |
Callback for when a new object description is available.
| SimulationViewer::SIMCALLBACK_DECLARE | ( | SimulationViewer | , | |
| SimEventSceneDescription | ||||
| ) | [protected] |
Callback for when a new scene description is available.
OModelParam<bool> SimulationViewer::itsDisplayInterp [protected] |
use interpolation to display maps?
Definition at line 84 of file SimulationViewer.H.
Referenced by SimulationViewerStd::drawMegaCombo(), SimulationViewerEyeHand::getTraj(), SimulationViewerEyeMvtNeuro::getTraj(), SimulationViewerStd::getTraj(), SimulationViewerEyeRegion::getTraj(), SimulationViewerCompress::getTraj(), SimulationViewerEyeMvt::getTraj(), SimulationViewerStd::prepMapForDisplay(), and SimulationViewerStats::save1().
OModelParam<float> SimulationViewer::itsMapFactor [protected] |
factor to use to display maps
Definition at line 85 of file SimulationViewer.H.
Referenced by SimulationViewerStd::drawMegaCombo(), and getMap().
OModelParam<std::string> SimulationViewer::itsMapType [protected] |
type of map to use for displays
Definition at line 86 of file SimulationViewer.H.
Referenced by SimulationViewerStd::drawMegaCombo(), and getMap().
 1.6.3
1.6.3