
Public Slots | |
| void | gotEncoderVal (int joint, int val) |
| void | gotPWMVal (int joint, float val) |
| void | gotTargetPos (int joint, int val) |
| void | gotGravityCompensation (float comp) |
| void | pidAxisSelected (int index) |
| void | setPIDVals () |
| void | resetEncoders () |
| void | setPosition (int joint) |
| void | toggleMotorsEnabled () |
| void | addData (QString plotName, double data) |
| void | updatePlots () |
| void | printPosCode () |
| Prints some hacky C++ to stdout. | |
Public Member Functions | |
| ScorbotConsole (OptionManager &mgr, const std::string &descrName="ScorbotConsole", const std::string &tagName="ScorbotInterface") | |
| void | stop1 () |
| This is called from within stop() before the subcomponents stop. | |
| void | start2 () |
| This is called from within start() after the subcomponents have started. | |
| void | plotLine (std::vector< float > plot, PixRGB< byte > color) |
Public Attributes | |
|
QMap< ScorbotIce::JointType, QString > | jointStringMap |
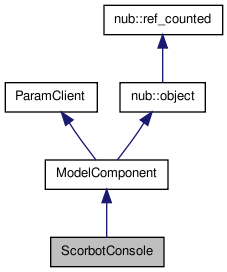
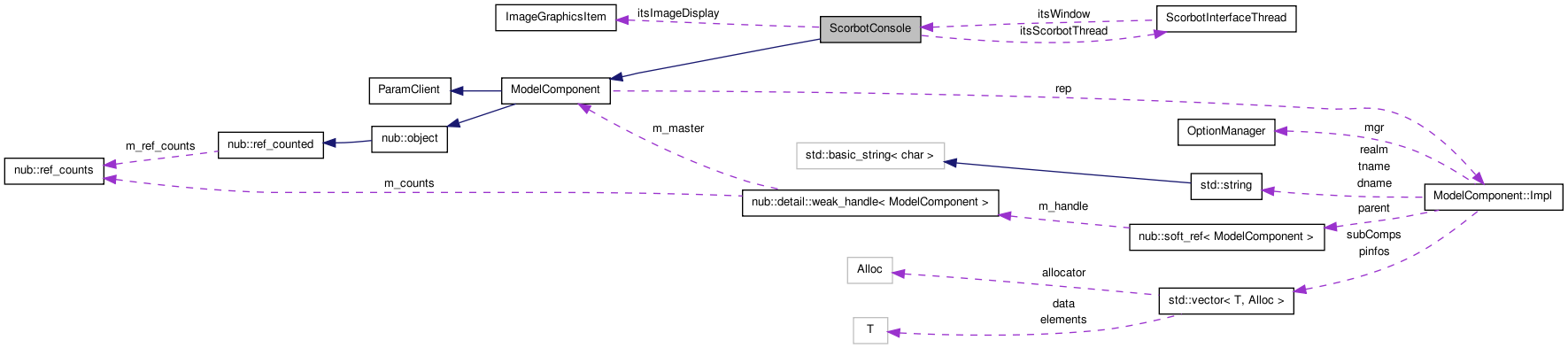
Definition at line 15 of file ScorbotConsole.qt.H.
| void ScorbotConsole::printPosCode | ( | ) | [slot] |
Prints some hacky C++ to stdout.
Definition at line 521 of file ScorbotConsole.qt.C.
Referenced by start2().
| void ScorbotConsole::start2 | ( | ) | [virtual] |
This is called from within start() after the subcomponents have started.
Reimplemented from ModelComponent.
Definition at line 141 of file ScorbotConsole.qt.C.
References printPosCode().
| void ScorbotConsole::stop1 | ( | ) | [virtual] |
This is called from within stop() before the subcomponents stop.
Reimplemented from ModelComponent.
Definition at line 129 of file ScorbotConsole.qt.C.
 1.6.3
1.6.3