
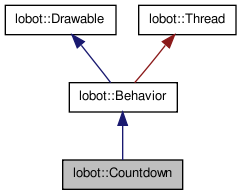
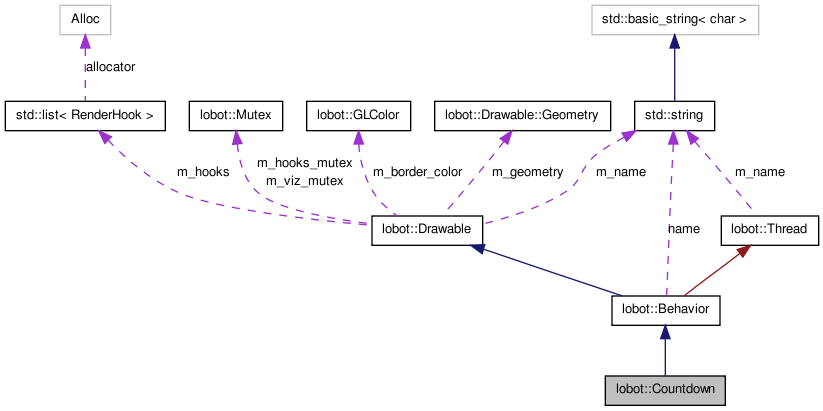
A "stop watch" behaviour that either pauses the robot or quits the controller application once the counter hits zero. More...
#include <Robots/LoBot/control/LoCountdown.H>
Friends | |
| class | subfactory< Countdown, base > |
A "stop watch" behaviour that either pauses the robot or quits the controller application once the counter hits zero.
This class implements a behaviour that keeps track of how much time has elapsed since the robot started running. When this time exceeds some preconfigured duration, the behaviour will quit the high-level controller application.
NOTE: The stop watch continues to count down even if the robot is paused!
Definition at line 70 of file LoCountdown.H.
 1.6.3
1.6.3