
Abstract interface for the robot's sensorimotor system. More...
#include "Robots/LoBot/io/LoSerial.H"#include "Robots/LoBot/thread/LoMutex.H"#include "Robots/LoBot/util/LoBits.H"#include "Component/ModelManager.H"#include <vector>#include <utility>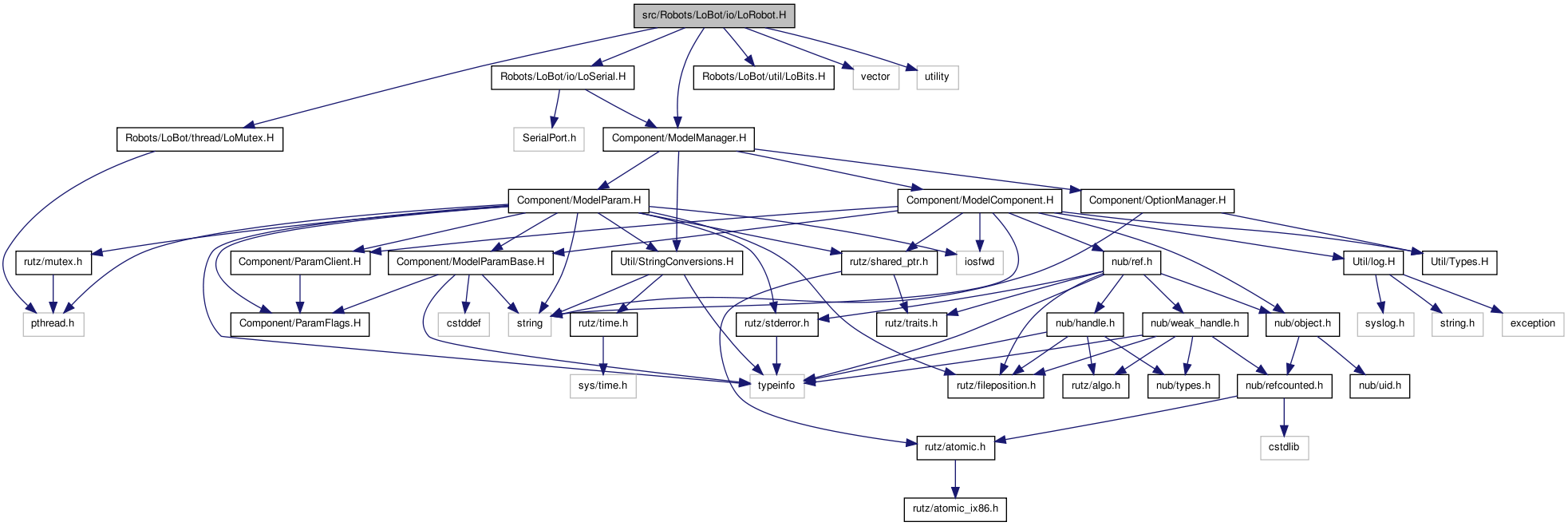

Go to the source code of this file.
Classes | |
| class | lobot::Robot |
| High-level API for driving and steering the robot and keeping track of its sensors. More... | |
| class | lobot::Robot::Sensors |
Abstract interface for the robot's sensorimotor system.
This file defines an abstract base class that provides a high-level API for moving and steering the robot. This class also provides a Sensor object that holds the current values of the robot's sensors. Communication with the robot platform is achieved over a serial port.
Different derived classes, by implementing the inner workings of this API, can be used to command different robot platforms and keep track of their sensors (e.g., a hacked R/C car or a Roomba).
Definition in file LoRobot.H.
 1.6.3
1.6.3