
Public Member Functions | |
| Roomba (OptionManager &mgr, const std::string &descrName="Roomba", const std::string &tagName="Roomba", const char *defdev="/dev/ttyUSB0") | |
| Default constructor. | |
| ~Roomba () | |
| Destructor. | |
| int | getSpeed () |
| int | getAngle () |
| int | getRadius () |
| int | getDist () |
| void | setSpeed (const int speed) |
| void | setRadius (const int radius) |
| void | sendRawCmd (const std::string &data) |
| void | playSong (int song) |
| void | sendStart () |
| void | setMode (const int mode) |
| void | setDemo (const short demo) |
| void | setLED (const short led, const short color, const short intensity) |
| void | getDistanceAngle (int &dist, int &ang) |
| void | sendDriveCommand () |
| Send the command to drive the robot. | |
| void | sendDirectDriveCommand (float steering) |
| Send the command to direct drive the robot. | |
Protected Attributes | |
| int | itsSpeed |
| int | itsRadius |
| current speed | |
| int | itsAngle |
| current turning radius set | |
| int | itsDist |
| total angle turned since start | |
| bool | robotStarted |
| total dist travelled since start | |
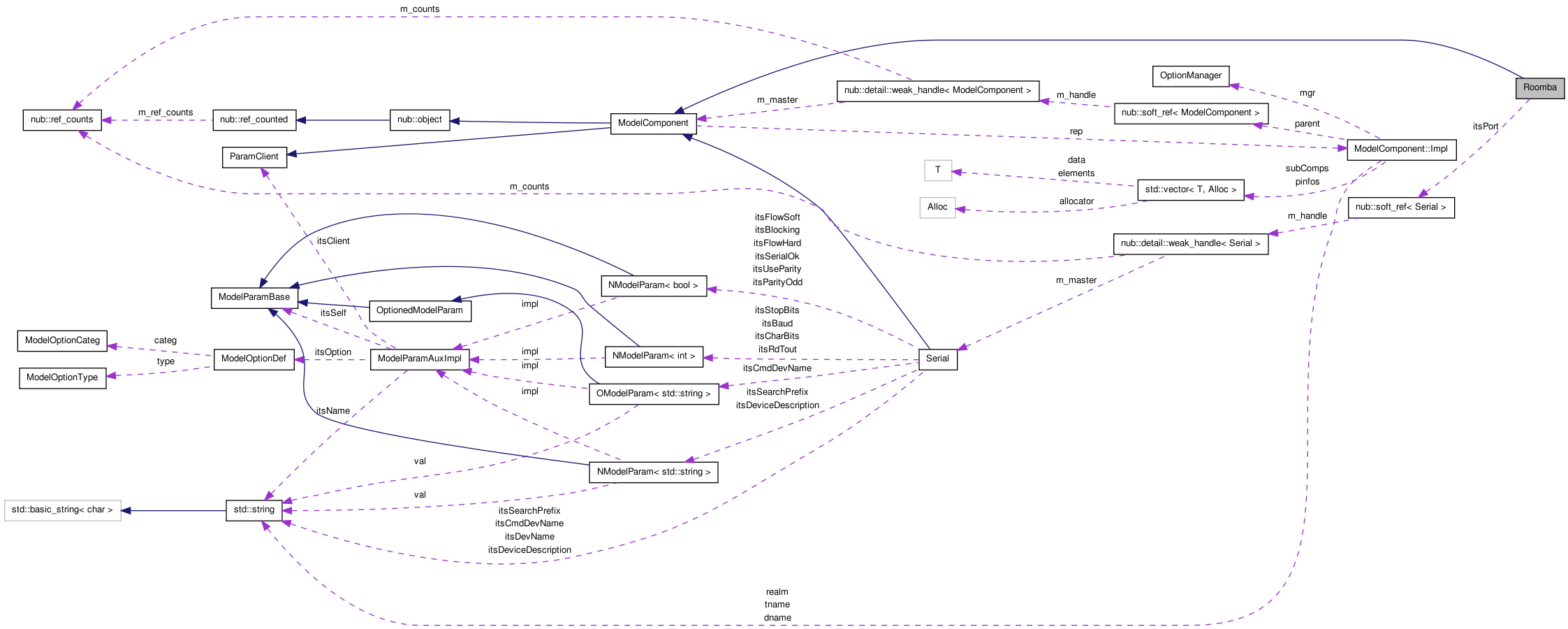
| nub::soft_ref< Serial > | itsPort |
| robot start status must be true to send commands | |
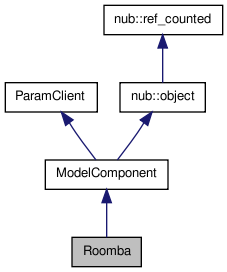
Definition at line 47 of file Roomba.H.
| Roomba::Roomba | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "Roomba", |
|||
| const std::string & | tagName = "Roomba", |
|||
| const char * | defdev = "/dev/ttyUSB0" | |||
| ) |
| void Roomba::sendDirectDriveCommand | ( | float | steering | ) |
| void Roomba::sendDriveCommand | ( | ) |
Send the command to drive the robot.
Definition at line 116 of file Roomba.C.
References itsPort, itsRadius, and robotStarted.
int Roomba::itsAngle [protected] |
int Roomba::itsDist [protected] |
nub::soft_ref<Serial> Roomba::itsPort [protected] |
robot start status must be true to send commands
Definition at line 86 of file Roomba.H.
Referenced by Roomba(), sendDirectDriveCommand(), and sendDriveCommand().
int Roomba::itsRadius [protected] |
current speed
Definition at line 82 of file Roomba.H.
Referenced by Roomba(), and sendDriveCommand().
bool Roomba::robotStarted [protected] |
total dist travelled since start
Definition at line 85 of file Roomba.H.
Referenced by sendDriveCommand().
 1.6.3
1.6.3