
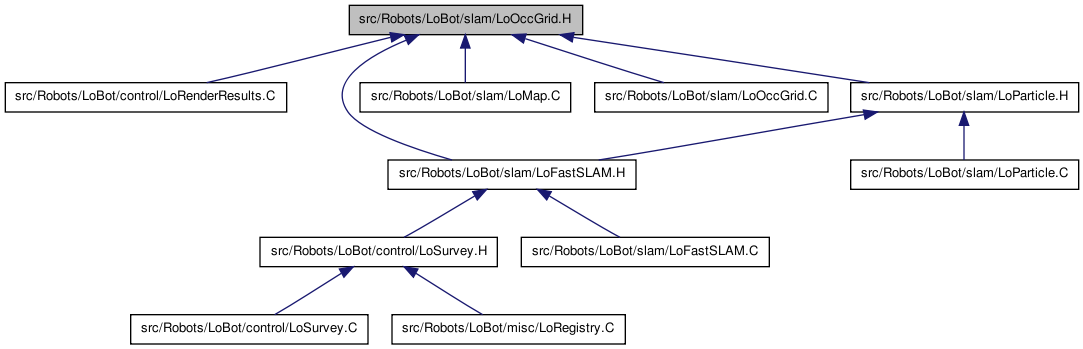
A log-odds occupancy grid that acts as an obstacle map. More...
#include <string>#include <vector>
Go to the source code of this file.
Classes | |
| class | lobot::OccGrid |
| A log-odds occupancy grid. More... | |
A log-odds occupancy grid that acts as an obstacle map.
This file defines a class that implements an obstacle map for the Robolocust system. This map is an occupancy grid that holds probability values rather than simple 0/1 flags indicating the absence or presence of obstacles. Furthermore, the probabilities are stored in log-odds form.
The grid is discretized so that, for example, each cell represents 10 sq.mm of "real" space. The range sensor readings are then binned when determining which cell in the map they "hit."
The occupancy grid's extents are defined by [L, R, B, T] values.
Definition in file LoOccGrid.H.
 1.6.3
1.6.3