
#include "BeoSub/BeoSubIMU.H"#include "Devices/HMR3300.H"#include "Component/ModelManager.H"#include <math.h>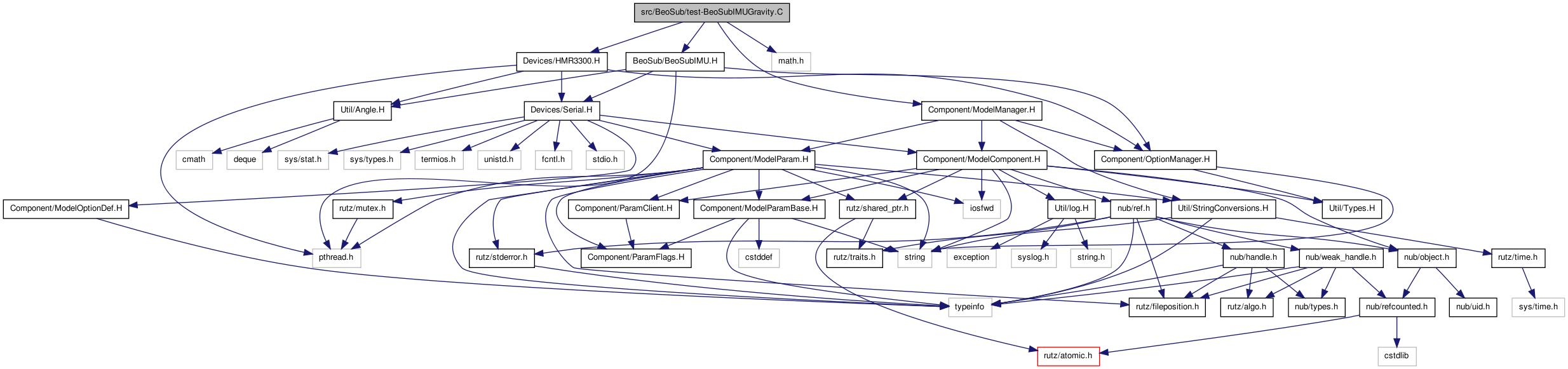
Go to the source code of this file.
Classes | |
| class | TestHMR3300Listener |
| class | TestBeoSubIMUListener |
| A hook which will be called when a new IMU reading is received. More... | |
Functions | |
| int | main (const int argc, const char **argv) |
Variables | |
| float | xAccel = 0 |
| float | yAccel = 0 |
| float | zAccel = 0 |
| Angle | xVel = 0 |
| Angle | yVel = 0 |
| Angle | zVel = 0 |
| Angle | cHeading = 0 |
| Angle | cPitch = 0 |
| Angle | cRoll = 0 |
| Angle | hError = 0 |
| Angle | pError = 0 |
| Angle | rError = 0 |
| Angle | realPitch = 0 |
| Angle | realRoll = 0 |
| float | realXAccel = 0 |
| float | realZAccel = 0 |
| bool | firstTime = true |
test the IMU
Definition in file test-BeoSubIMUGravity.C.
 1.6.3
1.6.3