
Definition and access functions for the BeoSub. More...
#include <BeoSub/SeaBee.H>
Public Member Functions | |
| void | test () |
| void | setTransVel (const float desired) |
Constructors and Destructors | |
| SeaBee (OptionManager &mgr) | |
| Constructor. | |
| ~SeaBee () | |
| Destructor. | |
mid-level overloads | |
| virtual void | advanceRel (const float relDist, const bool stop=true) |
| Advance the sub by some distance in meters. | |
| void | turnOpen (Angle ang, bool b) |
| Strafes the sub by some distance in meters. | |
| void | dropMarker (bool b) |
| Drop a marker. | |
| Image< PixRGB< byte > > | grabImage (BeoSubCamera bsc) const |
| Grab a an image from one of the cameras. | |
Low-level access functions | |
| void | thrust (const float leftval, const float rightval) |
| Activate the thrusters. | |
| void | dive (const float leftval, const float rightval) |
| void | getThrusters (float &leftval, float &rightval) const |
| Get the current thruster settings. | |
| void | getDiveThrusters (float &leftval, float &rightval) const |
For internal use by our listeners only -- do not call | |
|
| |
| nub::soft_ref< BeoChip > | itsBeo |
| our beochip | |
| float | itsThrustLeftV |
| float | itsThrustRightV |
| float | itsThrustLeftH |
| float | itsThrustRightH |
| our current thruster settings | |
| float | itsDiveSetting |
| class | BeoSubListener |
| virtual void | start1 () |
| get started, before our subcomponents start | |
| virtual void | start2 () |
| get started, after our subcomponents have started | |
| virtual void | stop1 () |
| This is called from within stop() before the subcomponents stop. | |
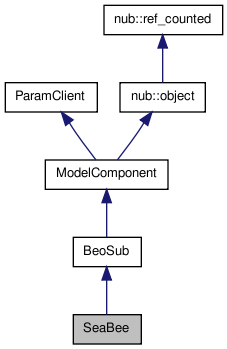
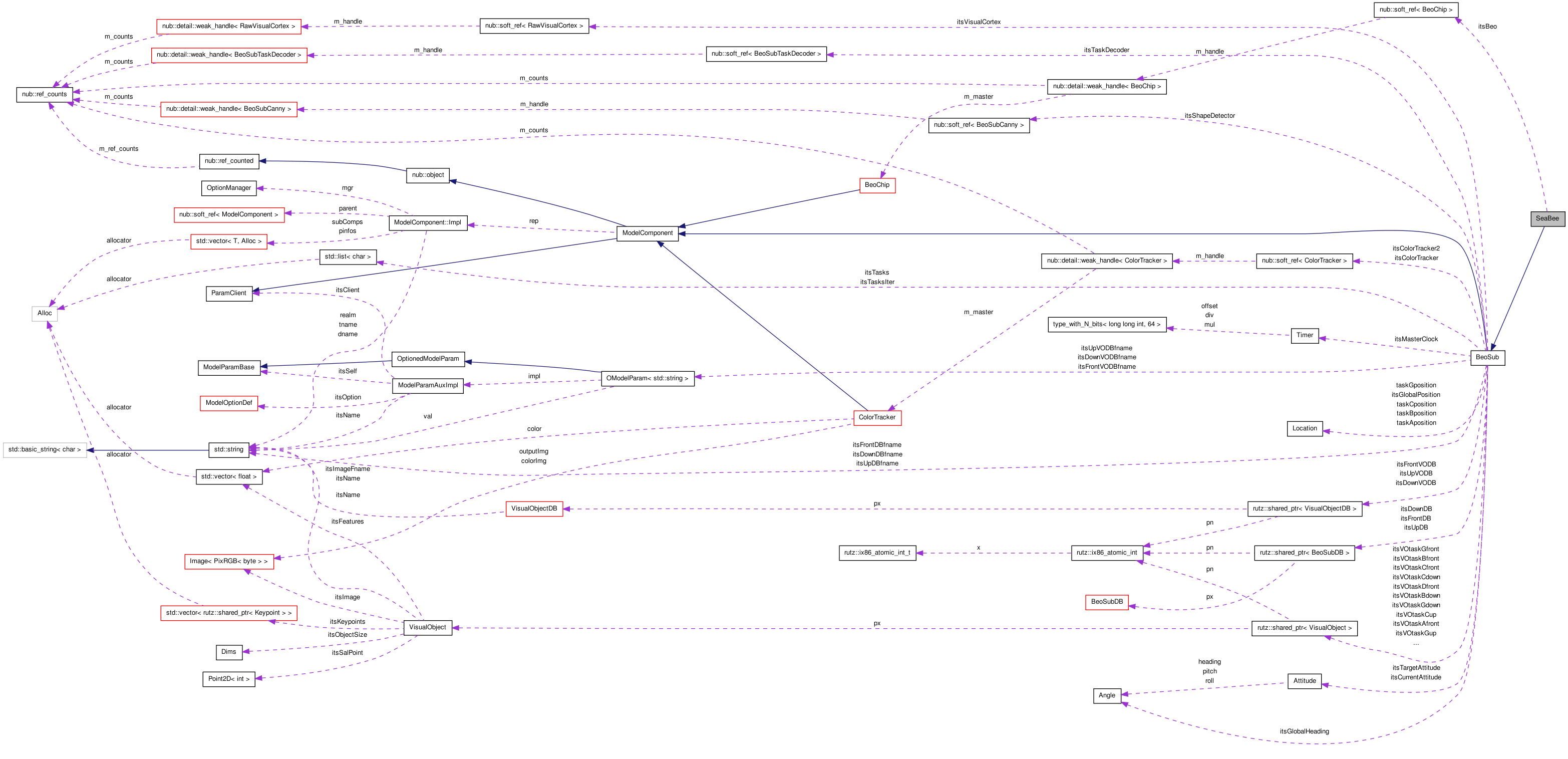
Definition and access functions for the BeoSub.
BeoSub is an autonomous visually-guided submarine. This class impoements the highl-evel functionality, relying on low-level drivers to handle motor activation, compass reading, etc
Definition at line 49 of file SeaBee.H.
| SeaBee::SeaBee | ( | OptionManager & | mgr | ) |
| void SeaBee::advanceRel | ( | const float | relDist, | |
| const bool | stop = true | |||
| ) | [virtual] |
Advance the sub by some distance in meters.
This is an overload of BeoSub::advanceRel() which ensures we turn off the heading PID during the advance
Implements BeoSub.
Definition at line 248 of file SeaBee.C.
References Angle::getRadians().
| void SeaBee::dropMarker | ( | bool | blocking | ) | [virtual] |
| void SeaBee::getThrusters | ( | float & | leftval, | |
| float & | rightval | |||
| ) | const |
Get the current thruster settings.
Definition at line 407 of file SeaBee.C.
References itsThrustRightH.
| Image< PixRGB< byte > > SeaBee::grabImage | ( | BeoSubCamera | cam | ) | const [virtual] |
| void SeaBee::start1 | ( | ) | [protected, virtual] |
| void SeaBee::start2 | ( | ) | [protected, virtual] |
get started, after our subcomponents have started
Reimplemented from ModelComponent.
Definition at line 207 of file SeaBee.C.
References itsBeo.
| void SeaBee::stop1 | ( | ) | [protected, virtual] |
This is called from within stop() before the subcomponents stop.
Reimplemented from ModelComponent.
| void SeaBee::thrust | ( | const float | leftval, | |
| const float | rightval | |||
| ) |
| void SeaBee::turnOpen | ( | Angle | ang, | |
| bool | b | |||
| ) | [virtual] |
Strafes the sub by some distance in meters.
This is an overload of BeoSub::strafeRel() which ensures we turn the heading PID off during the strafe
Implements BeoSub.
nub::soft_ref<BeoChip> SeaBee::itsBeo [protected] |
float SeaBee::itsThrustRightH [protected] |
our current thruster settings
Definition at line 140 of file SeaBee.H.
Referenced by getThrusters().
 1.6.3
1.6.3