
A Bayesian time-to-impact state estimator. More...
#include "Robots/LoBot/ui/LoDrawable.H"#include "Robots/LoBot/tti/LoSensorModel.H"#include "Robots/LoBot/lgmd/LocustModel.H"#include "Robots/LoBot/misc/LoVector.H"#include "Robots/LoBot/misc/wma.hh"#include "Robots/LoBot/util/range.hh"#include <deque>#include <vector>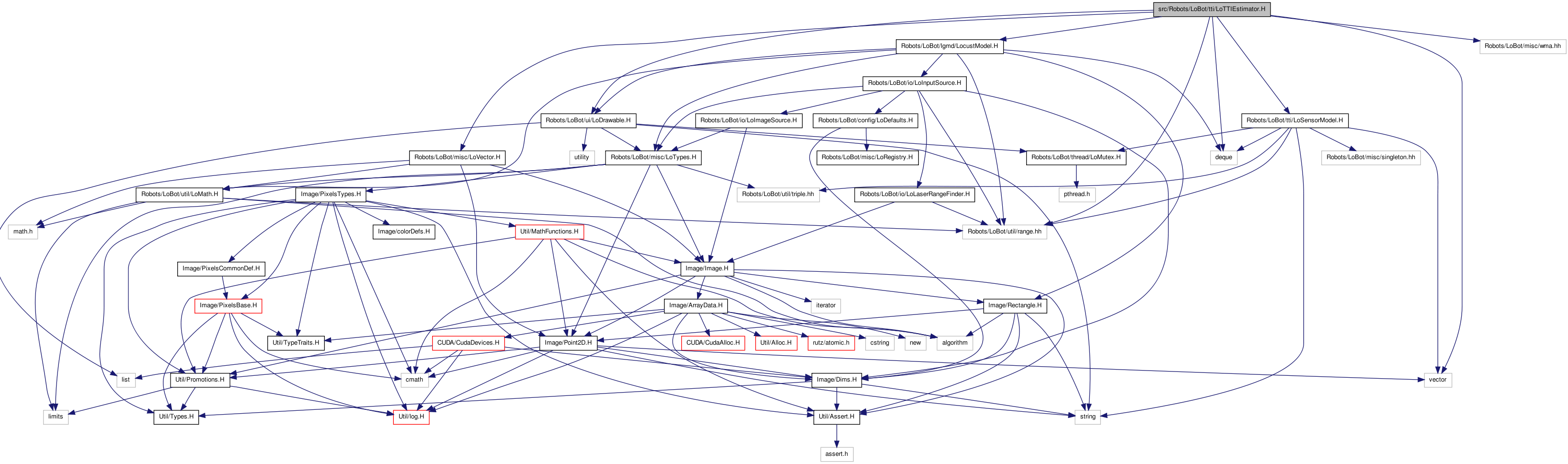
Go to the source code of this file.
Classes | |
| class | lobot::TTIEstimator |
| Encapsulation of Bayesian time-to-impact estimation using LGMD spike rates. More... | |
A Bayesian time-to-impact state estimator.
This file defines a class that estimates time-to-impact from LGMD spikes.
As per the research by Gabbiani, et al., we know that LGMD spikes are related to the time-to-impact of approaching objects. Unfortunately, given a spike rate, we cannot easily determine the corresponding time-to-impact (TTI) because the spike rate function is non-invertible.
Thus, for each (actual or virtual) locust connected to the robot, we will have a corresponding TTI estimator that will perform Bayesian state estimation in an attempt to determine the corresponding TTI given spike rate. Once we have the TTI for a locust, we can use the velocity information returned by the robot's motor system to calculate a distance estimate for that locust. This would, in effect, allow us to use the locust array as a kind of range sensor.
Definition in file LoTTIEstimator.H.
 1.6.3
1.6.3