
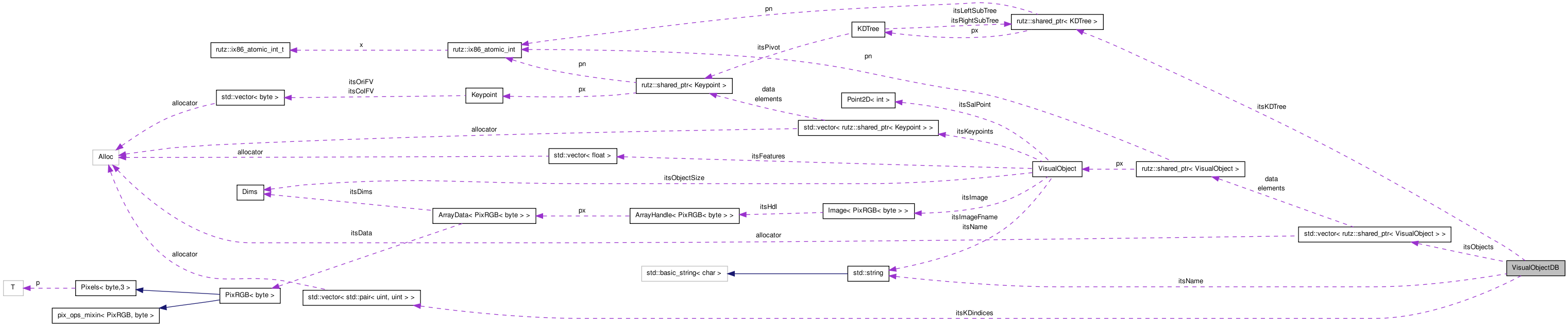
VisualObjectDatabase. More...
#include <SIFT/VisualObjectDB.H>
Public Member Functions | |
| VisualObjectDB () | |
| Constructor; use operator>> and operator<< to load/save. | |
| ~VisualObjectDB () | |
| Destructor. | |
| bool | loadFrom (const std::string &fname, bool preloadImage=true) |
| Easy loading from file. | |
| bool | saveTo (const std::string &fname) |
| Easy saving to file. | |
| std::string | getName () const |
| name access methods | |
| void | setName (const std::string &name) |
| uint | numObjects () const |
| get number of objects in the database | |
| const rutz::shared_ptr < VisualObject > & | getObject (const uint index) const |
| object getter | |
| void | setObject (const uint index, const rutz::shared_ptr< VisualObject > &obj) |
| object setter | |
| void | eraseObject (const uint index) |
| erase object | |
| void | clearObjects (uint size=0) |
| rutz::shared_ptr< VisualObject > | getObject (const std::string objectName) const |
| object getter by name | |
| bool | addObject (const rutz::shared_ptr< VisualObject > &obj, bool uniqueName=true) |
| add object | |
| void | buildKDTree () |
| Build a giant internal KDTree from all our Keypoints. | |
| uint | getObjectMatches (const rutz::shared_ptr< VisualObject > obj, std::vector< rutz::shared_ptr< VisualObjectMatch > > &matches, const VisualObjectMatchAlgo algo=VOMA_SIMPLE, const uint maxn=5U, const float kcoeff=0.5F, const float acoeff=0.5F, const float minscore=1.0F, const uint mink=3U, const uint kthresh=6U, const bool sortbypf=false) |
| find match for the keypoints in the scene | |
| uint | getObjectMatchesParallel (const rutz::shared_ptr< VisualObject > obj, std::vector< rutz::shared_ptr< VisualObjectMatch > > &matches, const uint numthreads=4, const float kcoeff=0.5F, const float acoeff=0.5F, const float minscore=1.0F, const uint mink=3U, const uint kthresh=6U, const bool sortbypf=false) |
| find match for the keypoints in the scene, parallel version | |
| void | createVisualObjectDB (std::istream &is, VisualObjectDB &vdb, bool preloadImage=true) |
Friends | |
| std::istream & | operator>> (std::istream &is, VisualObjectDB &vdb) |
| Load a VisualObjectDB from an istream. | |
| std::ostream & | operator<< (std::ostream &os, const VisualObjectDB &vdb) |
| Save a VisualObjectDB to an ostream. | |
VisualObjectDatabase.
Definition at line 52 of file VisualObjectDB.H.
| VisualObjectDB::VisualObjectDB | ( | ) |
Constructor; use operator>> and operator<< to load/save.
Definition at line 51 of file VisualObjectDB.C.
| VisualObjectDB::~VisualObjectDB | ( | ) |
Destructor.
Definition at line 56 of file VisualObjectDB.C.
| bool VisualObjectDB::addObject | ( | const rutz::shared_ptr< VisualObject > & | obj, | |
| bool | uniqueName = true | |||
| ) |
add object
Definition at line 92 of file VisualObjectDB.C.
References rutz::shared_ptr< T >::reset().
Referenced by main(), and SceneRec::trainFeature().
| void VisualObjectDB::buildKDTree | ( | ) |
Build a giant internal KDTree from all our Keypoints.
This will automatically be called by getObjectMatches() if an up-to-date KDTree is not internally available. This function is made public because it may take a while to run, and is best run just after loading a DB, rather than on the first match attempt. If an up-to-date KDTree is already internally available, this is a no-op.
Definition at line 137 of file VisualObjectDB.C.
References rutz::shared_ptr< T >::is_valid(), and rutz::shared_ptr< T >::reset().
Referenced by getObjectMatches().
| void VisualObjectDB::eraseObject | ( | const uint | index | ) | [inline] |
| std::string VisualObjectDB::getName | ( | void | ) | const [inline] |
| rutz::shared_ptr< VisualObject > VisualObjectDB::getObject | ( | const std::string | objectName | ) | const [inline] |
object getter by name
Returns an uninitialized rutz::shared_ptr is not found.
Definition at line 211 of file VisualObjectDB.H.
| const rutz::shared_ptr< VisualObject > & VisualObjectDB::getObject | ( | const uint | index | ) | const [inline] |
| uint VisualObjectDB::getObjectMatches | ( | const rutz::shared_ptr< VisualObject > | obj, | |
| std::vector< rutz::shared_ptr< VisualObjectMatch > > & | matches, | |||
| const VisualObjectMatchAlgo | algo = VOMA_SIMPLE, |
|||
| const uint | maxn = 5U, |
|||
| const float | kcoeff = 0.5F, |
|||
| const float | acoeff = 0.5F, |
|||
| const float | minscore = 1.0F, |
|||
| const uint | mink = 3U, |
|||
| const uint | kthresh = 6U, |
|||
| const bool | sortbypf = false | |||
| ) |
find match for the keypoints in the scene
| obj | the VisualObject to match against the objects in our database. | |
| matches | list of matches which satisfy all criteria, sorted by matching score. Note: the list is initially cleared. | |
| algo | the algorithm to use for matching (see VisualObjectMatch.H). | |
| maxn | the maximum number of object matches to return. NOTE: we will return the first maxn matches found without exploring the database any further. If this is not desirable, use a large matchn. You can also use sortbypf below to attempt that these first matches will indeed be the best ones. | |
| kcoeff | coefficient for keypoint distance, used to score a match. See VisualObjectMatch::getScore(). | |
| acoeff | coefficient for affine distance, used to score a match. See VisualObjectMatch::getScore(). | |
| minscore | min acceptable VisualObjectMatch::getScore(kcoeff, acoeff). | |
| mink | minimum number of matching keypoints in an object match. | |
| kthresh | threshold to use for keypoint selection in obj; see VisualObject constructor and ScaleSpace. | |
| sortbypf | sort our database by similarity of preattentive visual features if true. This is incompatible with KDTree-based matching algos, which would not benefit from this sorting. |
Definition at line 182 of file VisualObjectDB.C.
References buildKDTree(), KeypointMatch::distSq, KeypointMatch::distSq2, max(), KeypointMatch::refkp, and KeypointMatch::tstkp.
Referenced by SceneRec::computeLocation(), InferotemporalCortexI::evolve(), and main().
| uint VisualObjectDB::getObjectMatchesParallel | ( | const rutz::shared_ptr< VisualObject > | obj, | |
| std::vector< rutz::shared_ptr< VisualObjectMatch > > & | matches, | |||
| const uint | numthreads = 4, |
|||
| const float | kcoeff = 0.5F, |
|||
| const float | acoeff = 0.5F, |
|||
| const float | minscore = 1.0F, |
|||
| const uint | mink = 3U, |
|||
| const uint | kthresh = 6U, |
|||
| const bool | sortbypf = false | |||
| ) |
find match for the keypoints in the scene, parallel version
Definition at line 370 of file VisualObjectDB.C.
References WorkThreadServer::enqueueJob(), WorkThreadServer::flushQueue(), and rutz::make_shared().
| bool VisualObjectDB::loadFrom | ( | const std::string & | fname, | |
| bool | preloadImage = true | |||
| ) |
Easy loading from file.
This will just open a file and use operator>> on it. Returns true on success.
Definition at line 60 of file VisualObjectDB.C.
References numObjects().
Referenced by ComplexObject::ComplexObject(), SceneRec::loadVisualDB(), and main().
| uint VisualObjectDB::numObjects | ( | ) | const [inline] |
get number of objects in the database
Definition at line 188 of file VisualObjectDB.H.
Referenced by SceneRec::computeLocation(), InferotemporalCortexI::evolve(), loadFrom(), SceneRec::loadVisualDB(), and saveTo().
| bool VisualObjectDB::saveTo | ( | const std::string & | fname | ) |
Easy saving to file.
This will just open a file and use operator<< on it. Returns true on success.
Definition at line 76 of file VisualObjectDB.C.
References numObjects().
Referenced by SceneRec::loadVisualDB(), main(), and SceneRec::trainFeature().
| void VisualObjectDB::setObject | ( | const uint | index, | |
| const rutz::shared_ptr< VisualObject > & | obj | |||
| ) | [inline] |
| std::ostream& operator<< | ( | std::ostream & | os, | |
| const VisualObjectDB & | vdb | |||
| ) | [friend] |
Save a VisualObjectDB to an ostream.
Definition at line 472 of file VisualObjectDB.C.
| std::istream& operator>> | ( | std::istream & | is, | |
| VisualObjectDB & | vdb | |||
| ) | [friend] |
Load a VisualObjectDB from an istream.
Definition at line 440 of file VisualObjectDB.C.
 1.6.3
1.6.3