
Public Member Functions | |
| void | setBias (int type, std::vector< float > &bias) |
| Set the bias values for the given cmap type. | |
| void | setBiasSM (bool val) |
| do we bias the saliency map or not | |
| void | getBias (Image< PixRGB< byte > > &img, std::vector< float > &bias, int type, Point2D< int > &loc) |
| get the bias values for the given cmap type at the specified location | |
| void | setSaliencyMapLevel (const short saliencyMapLevel) |
| void | setSMBias (ImageSet< float > &bias) |
Constructors and Destructors | |
| SaliencyMT (OptionManager &mgr, const std::string &descrName="SaliencyMT", const std::string &tagName="SaliencyMT") | |
| Constructor. | |
| ~SaliencyMT () | |
| Destructor. | |
| SaliencyMT (OptionManager &mgr, CORBA::ORB_ptr orb, short saliencyMapLevel, const std::string &descrName="SaliencyMT", const std::string &tagName="SaliencyMT") | |
| Constructor. | |
| ~SaliencyMT () | |
| Destructor. | |
| SaliencyMT (OptionManager &mgr, const std::string &descrName="SaliencyMT", const std::string &tagName="SaliencyMT") | |
| Constructor. | |
| ~SaliencyMT () | |
| Destructor. | |
| SaliencyMT (OptionManager &mgr, const std::string &descrName="SaliencyMT", const std::string &tagName="SaliencyMT") | |
| Constructor. | |
| ~SaliencyMT () | |
| Destructor. | |
| SaliencyMT (OptionManager &mgr, const std::string &descrName="SaliencyMT", const std::string &tagName="SaliencyMT") | |
| Constructor. | |
| ~SaliencyMT () | |
| Destructor. | |
member functions | |
| void | newInput (const Image< PixRGB< byte > > img, bool procFlicker=true) |
| Setup up with image to be processed and build the job queue. | |
| bool | outputReady () |
| Is the last given input done processing? | |
| Image< float > | getOutput () |
| Get last computed output. | |
| void | computeCMAP () |
| For internal thread use: Compute a conspicuity map from an image. | |
| void | newInput (const Image< PixRGB< byte > > img) |
| Setup up with image to be processed and build the job queue. | |
| bool | outputReady () |
| Is the last given input done processing? | |
| Image< float > | getOutput () |
| Get last computed output. | |
| Image< float > | getSMap (Image< PixRGB< byte > > img) |
| blocking call for getting the saliency map | |
| void | computeCMAP () |
| For internal thread use: Compute a conspicuity map from an image. | |
| void | newInput (const Image< PixRGB< byte > > img, bool procFlicker=true) |
| Setup up with image to be processed and build the job queue. | |
| bool | outputReady () |
| Is the last given input done processing? | |
| Image< float > | getOutput () |
| Get last computed output. | |
| void | computeCMAP () |
| For internal thread use: Compute a conspicuity map from an image. | |
| void | newInput (const Image< PixRGB< byte > > img, bool procFlicker=true) |
| Setup up with image to be processed and build the job queue. | |
| bool | outputReady () |
| Is the last given input done processing? | |
| Image< float > | getOutput () |
| Get last computed output. | |
| Image< float > | getRGOutput () |
| Image< float > | getBYOutput () |
| Image< float > | getIntensityOutput () |
| void | computeCMAP () |
| For internal thread use: Compute a conspicuity map from an image. | |
| void | newInput (const Image< PixRGB< byte > > img, bool procFlicker=true) |
| Setup up with image to be processed and build the job queue. | |
| bool | outputReady () |
| Is the last given input done processing? | |
| Image< float > | getOutput () |
| Get last computed output. | |
| Image< float > | getRGOutput () |
| Image< float > | getBYOutput () |
| Image< float > | getIntensityOutput () |
| void | computeCMAP () |
| For internal thread use: Compute a conspicuity map from an image. | |
Public Attributes | |
| int | nCmapObj |
| Number of cmap objects that we have running. | |
| CORBA::Object_ptr | CMap_ref [100] |
| Image< float > | cmaps [14] |
Protected Member Functions | |
| void | start1 () |
| get started | |
| void | stop2 () |
| get stopped | |
| void | start1 () |
| get started | |
| void | stop2 () |
| get stopped | |
| CMap_ptr | getCmapRef () |
| The current cmap object to send the request to. | |
| void | start1 () |
| get started | |
| void | stop2 () |
| get stopped | |
| void | start1 () |
| get started | |
| void | stop2 () |
| get stopped | |
| void | start1 () |
| get started | |
| void | stop2 () |
| get stopped | |
Protected Attributes | |
| OModelParam< uint > | itsNumThreads |
| Number of worker threads to use. | |
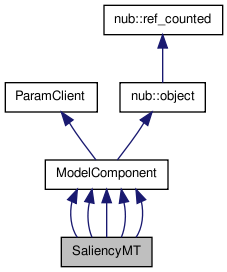
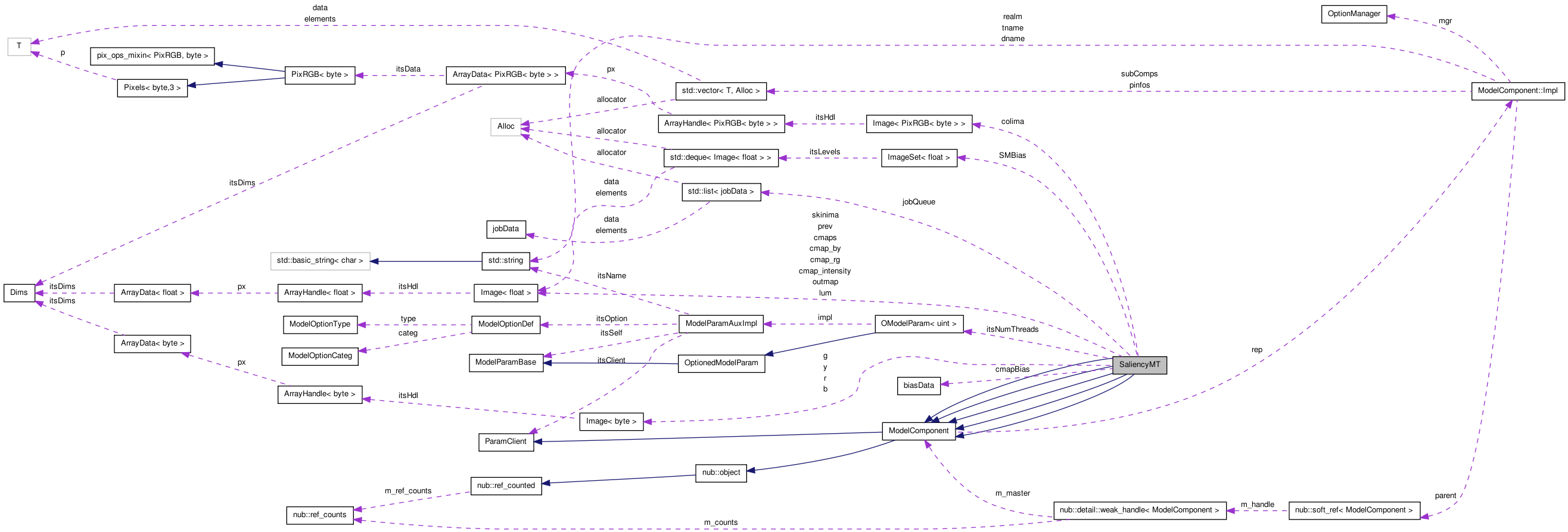
Definition at line 79 of file SaliencyMT.H.
| SaliencyMT::SaliencyMT | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "SaliencyMT", |
|||
| const std::string & | tagName = "SaliencyMT" | |||
| ) |
Constructor.
Definition at line 90 of file SaliencyMT.C.
| SaliencyMT::~SaliencyMT | ( | ) |
Destructor.
Definition at line 138 of file SaliencyMT.C.
| SaliencyMT::SaliencyMT | ( | OptionManager & | mgr, | |
| CORBA::ORB_ptr | orb, | |||
| short | saliencyMapLevel, | |||
| const std::string & | descrName = "SaliencyMT", |
|||
| const std::string & | tagName = "SaliencyMT" | |||
| ) |
Constructor.
Definition at line 84 of file SaliencyCMapMT.C.
References getMultiObjectRef(), and nCmapObj.
| SaliencyMT::~SaliencyMT | ( | ) |
Destructor.
| SaliencyMT::SaliencyMT | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "SaliencyMT", |
|||
| const std::string & | tagName = "SaliencyMT" | |||
| ) |
Constructor.
| SaliencyMT::~SaliencyMT | ( | ) |
Destructor.
| SaliencyMT::SaliencyMT | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "SaliencyMT", |
|||
| const std::string & | tagName = "SaliencyMT" | |||
| ) |
Constructor.
| SaliencyMT::~SaliencyMT | ( | ) |
Destructor.
| SaliencyMT::SaliencyMT | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "SaliencyMT", |
|||
| const std::string & | tagName = "SaliencyMT" | |||
| ) |
Constructor.
| SaliencyMT::~SaliencyMT | ( | ) |
Destructor.
| void SaliencyMT::computeCMAP | ( | ) |
For internal thread use: Compute a conspicuity map from an image.
| void SaliencyMT::computeCMAP | ( | ) |
For internal thread use: Compute a conspicuity map from an image.
| void SaliencyMT::computeCMAP | ( | ) |
For internal thread use: Compute a conspicuity map from an image.
| void SaliencyMT::computeCMAP | ( | ) |
For internal thread use: Compute a conspicuity map from an image.
| void SaliencyMT::computeCMAP | ( | ) |
For internal thread use: Compute a conspicuity map from an image.
Definition at line 208 of file SaliencyMT.C.
References buildPyrGeneric(), centerSurround(), downSize(), FLICKER, Gaussian5, Image< T >::getDims(), Image< T >::getHeight(), getRGBY(), Image< T >::getWidth(), hueDistance(), Image< T >::initialized(), maxNormalize(), MAXNORMMAX, MAXNORMMIN, Image< T >::resize(), VCXNORM_MAXNORM, and ZEROS.
| void SaliencyMT::getBias | ( | Image< PixRGB< byte > > & | img, | |
| std::vector< float > & | bias, | |||
| int | type, | |||
| Point2D< int > & | loc | |||
| ) |
get the bias values for the given cmap type at the specified location
Definition at line 325 of file SaliencyCMapMT.C.
References FLICKER, Gaussian5, getCmapRef(), getRGBY(), hueDistance(), Point2D< T >::i, image2Orb(), and Oriented5.
| CMap_ptr SaliencyMT::getCmapRef | ( | ) | [protected] |
The current cmap object to send the request to.
Definition at line 116 of file SaliencyCMapMT.C.
Referenced by getBias().
| Image<float> SaliencyMT::getOutput | ( | ) |
Get last computed output.
| Image<float> SaliencyMT::getOutput | ( | ) |
Get last computed output.
| Image<float> SaliencyMT::getOutput | ( | ) |
Get last computed output.
| Image<float> SaliencyMT::getOutput | ( | ) |
Get last computed output.
| Image< float > SaliencyMT::getOutput | ( | ) |
Get last computed output.
Definition at line 195 of file SaliencyMT.C.
blocking call for getting the saliency map
Definition at line 231 of file SaliencyCMapMT.C.
References newInput().
Setup up with image to be processed and build the job queue.
Setup up with image to be processed and build the job queue.
Setup up with image to be processed and build the job queue.
Setup up with image to be processed and build the job queue.
Definition at line 168 of file SaliencyCMapMT.C.
References Image< T >::freeMem(), and Gaussian5.
Setup up with image to be processed and build the job queue.
Definition at line 142 of file SaliencyMT.C.
References Image< T >::freeMem(), and Gaussian5.
Referenced by getSMap().
| bool SaliencyMT::outputReady | ( | ) |
Is the last given input done processing?
| bool SaliencyMT::outputReady | ( | ) |
Is the last given input done processing?
| bool SaliencyMT::outputReady | ( | ) |
Is the last given input done processing?
| bool SaliencyMT::outputReady | ( | ) |
Is the last given input done processing?
| bool SaliencyMT::outputReady | ( | ) |
Is the last given input done processing?
Definition at line 183 of file SaliencyMT.C.
| void SaliencyMT::setBias | ( | int | type, | |
| std::vector< float > & | bias | |||
| ) |
Set the bias values for the given cmap type.
Definition at line 277 of file SaliencyCMapMT.C.
References FLICKER.
| void SaliencyMT::setBiasSM | ( | bool | val | ) |
do we bias the saliency map or not
Definition at line 102 of file SaliencyCMapMT.C.
| void SaliencyMT::start1 | ( | ) | [protected, virtual] |
get started
Reimplemented from ModelComponent.
| void SaliencyMT::start1 | ( | ) | [protected, virtual] |
get started
Reimplemented from ModelComponent.
| void SaliencyMT::start1 | ( | ) | [protected, virtual] |
get started
Reimplemented from ModelComponent.
| void SaliencyMT::start1 | ( | ) | [protected, virtual] |
get started
Reimplemented from ModelComponent.
| void SaliencyMT::start1 | ( | ) | [protected, virtual] |
get started
Reimplemented from ModelComponent.
Definition at line 103 of file SaliencyMT.C.
References OModelParam< T >::getVal(), and itsNumThreads.
| void SaliencyMT::stop2 | ( | ) | [protected, virtual] |
get stopped
Reimplemented from ModelComponent.
| void SaliencyMT::stop2 | ( | ) | [protected, virtual] |
get stopped
Reimplemented from ModelComponent.
| void SaliencyMT::stop2 | ( | ) | [protected, virtual] |
get stopped
Reimplemented from ModelComponent.
| void SaliencyMT::stop2 | ( | ) | [protected, virtual] |
get stopped
Reimplemented from ModelComponent.
| void SaliencyMT::stop2 | ( | ) | [protected, virtual] |
OModelParam< uint > SaliencyMT::itsNumThreads [protected] |
Number of worker threads to use.
Definition at line 115 of file SaliencyMT.H.
Referenced by start1().
Number of cmap objects that we have running.
Definition at line 164 of file SaliencyCMapMT.H.
Referenced by SaliencyMT().
 1.6.3
1.6.3