
Definition and access functions for the BeoSubCanny. More...
#include <BeoSub/BeoSubCanny.H>
Public Member Functions | |
Constructors and Destructors | |
| BeoSubCanny (OptionManager &mgr, const std::string &descrName="BeoSubCanny", const std::string &tagName="BeoSubCanny") | |
| Constructor. | |
| ~BeoSubCanny () | |
| Destructor. | |
| BeoSubCanny (OptionManager &mgr, const std::string &descrName="BeoSubCanny", const std::string &tagName="BeoSubCanny") | |
| Constructor. | |
| ~BeoSubCanny () | |
| Destructor. | |
member functions | |
| int | canny (unsigned char *image, int rows, int cols, float sigma, float tlow, float thigh, unsigned char **edge, char *fname) |
| void | gaussian_smooth (unsigned char *image, int rows, int cols, float sigma, short int **smoothedim) |
| void | make_gaussian_kernel (float sigma, float **kernel, int *windowsize) |
| void | derrivative_x_y (short int *smoothedim, int rows, int cols, short int **delta_x, short int **delta_y) |
| void | magnitude_x_y (short int *delta_x, short int *delta_y, int rows, int cols, short int **magnitude) |
| void | radian_direction (short int *delta_x, short int *delta_y, int rows, int cols, float **dir_radians, int xdirtag, int ydirtag) |
| double | angle_radians (double x, double y) |
| void | grabImage (Image< PixRGB< byte > > *image) |
| void | setupCanny (const char *colorArg, Image< PixRGB< byte > > image, bool debug) |
| bool | runCanny (rutz::shared_ptr< ShapeModel > &shapeArg) |
| bool | powell (double p[], double **xi, int n, double ftol, int *iter, double *fret, rutz::shared_ptr< ShapeModel > &optimizee) |
| double | brent (double ax, double bx, double cx, double tol, double *xmin, rutz::shared_ptr< ShapeModel > &shape) |
| void | mnbrak (double *ax, double *bx, double *cx, double *fa, double *fb, double *fc, rutz::shared_ptr< ShapeModel > &shape) |
| double | f1dim (double x, rutz::shared_ptr< ShapeModel > &shape) |
| void | linmin (double p[], double xi[], int n, double *fret, rutz::shared_ptr< ShapeModel > &optimizee) |
| double * | nrVector (long nl, long nh) |
| void | free_nrVector (double *v, long nl, long nh) |
| int | canny (unsigned char *image, int rows, int cols, float sigma, float tlow, float thigh, unsigned char **edge, char *fname) |
| void | gaussian_smooth (unsigned char *image, int rows, int cols, float sigma, short int **smoothedim) |
| void | make_gaussian_kernel (float sigma, float **kernel, int *windowsize) |
| void | derrivative_x_y (short int *smoothedim, int rows, int cols, short int **delta_x, short int **delta_y) |
| void | magnitude_x_y (short int *delta_x, short int *delta_y, int rows, int cols, short int **magnitude) |
| void | radian_direction (short int *delta_x, short int *delta_y, int rows, int cols, float **dir_radians, int xdirtag, int ydirtag) |
| double | angle_radians (double x, double y) |
| void | grabImage (Image< PixRGB< byte > > *image) |
| void | setupCanny (const char *colorArg, Image< PixRGB< byte > > image, bool debug) |
| bool | runCanny (rutz::shared_ptr< ShapeModel > &shapeArg) |
| bool | powell (double p[], double **xi, int n, double ftol, int *iter, double *fret, rutz::shared_ptr< ShapeModel > &optimizee) |
| double | brent (double ax, double bx, double cx, double tol, double *xmin, rutz::shared_ptr< ShapeModel > &shape) |
| void | mnbrak (double *ax, double *bx, double *cx, double *fa, double *fb, double *fc, rutz::shared_ptr< ShapeModel > &shape) |
| double | f1dim (double x, rutz::shared_ptr< ShapeModel > &shape) |
| void | linmin (double p[], double xi[], int n, double *fret, rutz::shared_ptr< ShapeModel > &optimizee) |
| double * | nrVector (long nl, long nh) |
| void | free_nrVector (double *v, long nl, long nh) |
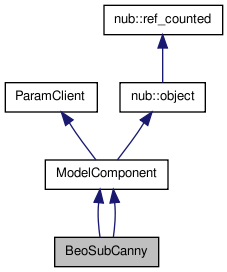
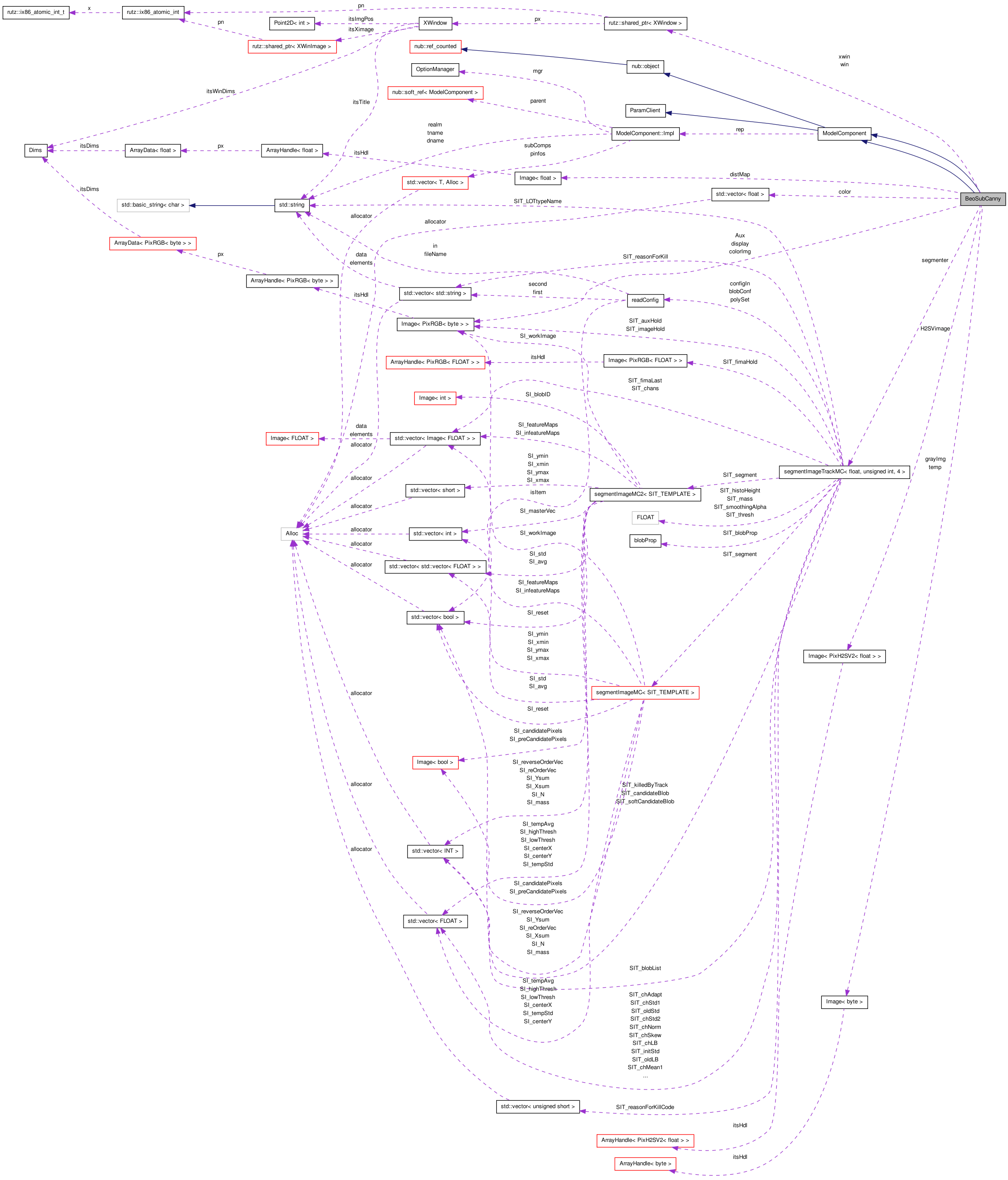
Definition and access functions for the BeoSubCanny.
BeoSubCanny is the vision class for submarine. It implements the Canny algorithm and can track shape and color
Definition at line 115 of file BeoSubCanny.H.
| BeoSubCanny::BeoSubCanny | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "BeoSubCanny", |
|||
| const std::string & | tagName = "BeoSubCanny" | |||
| ) |
Constructor.
Definition at line 48 of file BeoSubCanny.C.
| BeoSubCanny::~BeoSubCanny | ( | ) |
Destructor.
Definition at line 297 of file BeoSubCanny.C.
| BeoSubCanny::BeoSubCanny | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "BeoSubCanny", |
|||
| const std::string & | tagName = "BeoSubCanny" | |||
| ) |
Constructor.
| BeoSubCanny::~BeoSubCanny | ( | ) |
Destructor.
+/- tollerance value on mean for track
normalizer over color values (highest value possible)
how many standard deviations out to adapt, higher means less bias
highest value for color adaptation possible (hard boundry)
lowest value for color adaptation possible (hard boundry)
Definition at line 66 of file BeoSubCanny.C.
References drawDisk(), rutz::shared_ptr< T >::get(), Image< T >::getDims(), Image< T >::getHeight(), Image< T >::getWidth(), image, quickInterpolate(), rutz::shared_ptr< T >::reset(), Image< T >::resize(), segmentImageTrackMC::SITreturnCandidateImage(), segmentImageTrackMC::SITsetBoxColor(), segmentImageTrackMC::SITsetCircleColor(), segmentImageTrackMC::SITsetFrame(), segmentImageTrackMC::SITsetTrackColor(), segmentImageTrackMC::SITsetUseSmoothing(), segmentImageTrackMC::SITtoggleCandidateBandPass(), segmentImageTrackMC::SITtoggleColorAdaptation(), segmentImageTrackMC::SITtrackImageAny(), and ZEROS.
 1.6.3
1.6.3