
#include <stdlib.h>#include <time.h>#include <iostream>#include <unistd.h>#include <fcntl.h>#include <sys/types.h>#include <sys/stat.h>#include <signal.h>#include <SalGlasses.hh>#include "corbaUtil.h"#include "SalGlassesServer.h"#include "Envision/env_alloc.h"#include "Envision/env_c_math_ops.h"#include "Envision/env_image.h"#include "Envision/env_image_ops.h"#include "Envision/env_log.h"#include "Envision/env_mt_visual_cortex.h"#include "Envision/env_params.h"#include "Envision/env_pthread_interface.h"#include "Envision/env_stdio_interface.h"#include "Envision/env_visual_cortex.h"#include "capture.h"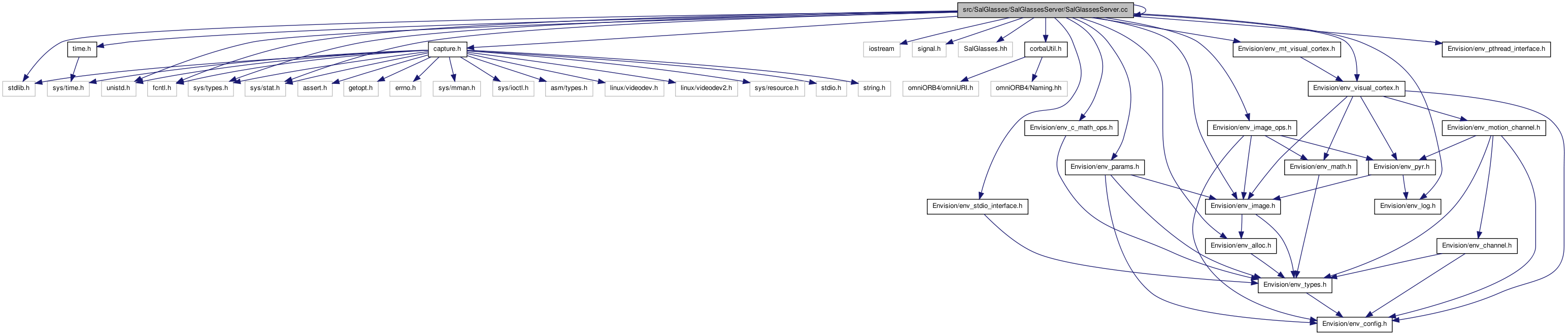

Go to the source code of this file.
Classes | |
| struct | status_data |
Defines | |
| #define | OBJECT_NS "saliency" |
| #define | OBJECT_NAME "SalGlasses" |
Functions | |
| static void * | malloc_thunk (env_size_t n) |
| static void | assert_handler (const char *what, int custom_msg, const char *where, int line_no) __attribute__((noreturn)) |
| static void | print_chan_status (void *userdata, const char *tagName, const struct env_image *img) |
| void | terminate (int s) |
| Signal handler (e.g., for control-C). | |
| int | main (int argc, char **argv) |
Variables | |
| CORBA::ORB_var | orb |
| CosNaming::Name | objectName |
| int | serialFd = -1 |
control salGlasses via corba
Definition in file SalGlassesServer.cc.
| void terminate | ( | int | s | ) |
Signal handler (e.g., for control-C).
Definition at line 108 of file SalGlassesServer.cc.
 1.6.3
1.6.3