
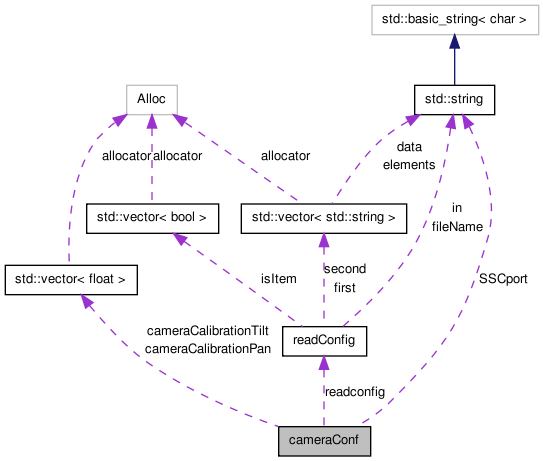
This class uses readConfig to extract config parameters for CameraControl. More...
#include <Devices/cameraConf.H>
Public Member Functions | |
| cameraConf (std::string fileName) | |
| default constructor, open config fileName and read | |
| cameraConf () | |
| default constructor, open config "camera.conf" and read | |
| ~cameraConf () | |
| default destructor | |
Public Attributes | |
| unsigned int | Xpixel |
| size of field of view in pixels | |
| unsigned int | Ypixel |
| size of field of view in pixels | |
| float | Xfield |
| size of field of view in degrees | |
| float | Yfield |
| size of field of view in degrees | |
| float | pixelSizeMM |
| pixel size in millimeters | |
| float | focalLengthMM |
| focal length in millimeters | |
| float | panOffsetMM |
| pan offset in millimeters | |
| float | tiltOffsetMM |
| tilt offset in millimeters | |
| float | Xcenter |
| camera center in degrees | |
| float | Ycenter |
| camera center in degrees | |
| float | servoPixels |
| servo pixels per degree | |
| float | travelSpeed |
| default travel speed from 0 to 1 | |
| int | travelTime |
| the time it takes to complete a 90 degree travel in milliseconds | |
| int | minTravelTime |
| minimum travel time | |
| unsigned int | startCenterCamera |
| center camera at start 1 = yes | |
| unsigned int | finishCenterCamera |
| center camera at finish | |
| unsigned int | SSCXconnector |
| servo connections on SSC | |
| unsigned int | SSCYconnector |
| servo connections on SSC | |
| unsigned int | SSCbaud |
| baud tranfer rate 2400 or 9600 only | |
| std::string | SSCport |
| SSC serial port device;. | |
| float | XlimitStart |
| X Travel Limit in degrees. | |
| float | XlimitEnd |
| X Travel Limit in degrees. | |
| float | YlimitStart |
| Y Travel Limit in degrees. | |
| float | YlimitEnd |
| Y Travel Limit in degrees. | |
| float | fieldAdjustmentX |
| manual field adjustment | |
| float | fieldAdjustmentY |
| manual field adjustment | |
| float | pixelField |
| field size in pixels | |
| float | panCalibrate |
| Pan calibration in degrees. | |
| float | tiltCalibrate |
| Tilt calibration in degrees. | |
| float | minMove |
| minimum distance to move in seccade | |
| std::vector< float > | cameraCalibrationPan |
| std::vector< float > | cameraCalibrationTilt |
This class uses readConfig to extract config parameters for CameraControl.
This class reads config parameters from "camera.conf" or another specified config file and organizes them for use in CameraControl.
Definition at line 15 of file cameraConf.H.
| cameraConf::cameraConf | ( | std::string | fileName | ) |
default constructor, open config fileName and read
Definition at line 13 of file cameraConf.C.
References readConfig::openFile().
| cameraConf::cameraConf | ( | ) |
default constructor, open config "camera.conf" and read
Definition at line 8 of file cameraConf.C.
References readConfig::openFile().
| cameraConf::~cameraConf | ( | ) |
default destructor
Definition at line 98 of file cameraConf.C.
manual field adjustment
Definition at line 77 of file cameraConf.H.
Referenced by CameraControl::moveCamXYFrame(), segmentImageMerge2::SIMverganceSpring(), and segmentImageMerge::verganceSpring().
manual field adjustment
Definition at line 79 of file cameraConf.H.
Referenced by CameraControl::moveCamXYFrame(), segmentImageMerge2::SIMverganceSpring(), and segmentImageMerge::verganceSpring().
| unsigned int cameraConf::finishCenterCamera |
center camera at finish
Definition at line 59 of file cameraConf.H.
focal length in millimeters
Definition at line 38 of file cameraConf.H.
| float cameraConf::minMove |
minimum distance to move in seccade
Definition at line 87 of file cameraConf.H.
Referenced by CameraControl::moveCamXYFrame().
minimum travel time
Definition at line 55 of file cameraConf.H.
Referenced by CameraControl::moveCamXYFrame().
| float cameraConf::panCalibrate |
Pan calibration in degrees.
Definition at line 83 of file cameraConf.H.
| float cameraConf::panOffsetMM |
pan offset in millimeters
Definition at line 40 of file cameraConf.H.
| float cameraConf::pixelField |
field size in pixels
Definition at line 81 of file cameraConf.H.
| float cameraConf::pixelSizeMM |
pixel size in millimeters
Definition at line 36 of file cameraConf.H.
| float cameraConf::servoPixels |
servo pixels per degree
Definition at line 49 of file cameraConf.H.
Referenced by CameraControl::centerCamera(), CameraControl::moveCamTPFrame(), and CameraControl::moveCamXYFrame().
| unsigned int cameraConf::SSCbaud |
baud tranfer rate 2400 or 9600 only
Definition at line 65 of file cameraConf.H.
SSC serial port device;.
Definition at line 67 of file cameraConf.H.
| unsigned int cameraConf::SSCXconnector |
servo connections on SSC
Definition at line 61 of file cameraConf.H.
Referenced by CameraControl::panAbsolute(), and CameraControl::panRelative().
| unsigned int cameraConf::SSCYconnector |
servo connections on SSC
Definition at line 63 of file cameraConf.H.
Referenced by CameraControl::tiltAbsolute(), and CameraControl::tiltRelative().
| unsigned int cameraConf::startCenterCamera |
center camera at start 1 = yes
Definition at line 57 of file cameraConf.H.
Tilt calibration in degrees.
Definition at line 85 of file cameraConf.H.
| float cameraConf::tiltOffsetMM |
tilt offset in millimeters
Definition at line 42 of file cameraConf.H.
| float cameraConf::travelSpeed |
default travel speed from 0 to 1
Definition at line 51 of file cameraConf.H.
the time it takes to complete a 90 degree travel in milliseconds
Definition at line 53 of file cameraConf.H.
Referenced by CameraControl::moveCamTPFrame(), and CameraControl::moveCamXYFrame().
| float cameraConf::Xcenter |
camera center in degrees
Definition at line 45 of file cameraConf.H.
Referenced by CameraControl::CameraControl(), and CameraControl::centerCamera().
| float cameraConf::Xfield |
size of field of view in degrees
Definition at line 32 of file cameraConf.H.
Referenced by CameraControl::moveCamXYFrame(), segmentImageMerge2::SIMverganceSpring(), and segmentImageMerge::verganceSpring().
| float cameraConf::XlimitEnd |
X Travel Limit in degrees.
Definition at line 71 of file cameraConf.H.
Referenced by CameraControl::moveCamTPFrame(), CameraControl::moveCamXYFrame(), CameraControl::panAbsolute(), and CameraControl::panRelative().
| float cameraConf::XlimitStart |
X Travel Limit in degrees.
Definition at line 69 of file cameraConf.H.
Referenced by CameraControl::moveCamTPFrame(), CameraControl::moveCamXYFrame(), CameraControl::panAbsolute(), and CameraControl::panRelative().
| unsigned int cameraConf::Xpixel |
size of field of view in pixels
Definition at line 28 of file cameraConf.H.
Referenced by CameraControl::moveCamXYFrame(), CameraControl::setImageSize(), segmentImageMerge2::SIMverganceSpring(), and segmentImageMerge::verganceSpring().
| float cameraConf::Ycenter |
camera center in degrees
Definition at line 47 of file cameraConf.H.
Referenced by CameraControl::CameraControl(), and CameraControl::centerCamera().
| float cameraConf::Yfield |
size of field of view in degrees
Definition at line 34 of file cameraConf.H.
Referenced by CameraControl::moveCamXYFrame(), segmentImageMerge2::SIMverganceSpring(), and segmentImageMerge::verganceSpring().
| float cameraConf::YlimitEnd |
Y Travel Limit in degrees.
Definition at line 75 of file cameraConf.H.
Referenced by CameraControl::moveCamTPFrame(), CameraControl::moveCamXYFrame(), CameraControl::tiltAbsolute(), and CameraControl::tiltRelative().
| float cameraConf::YlimitStart |
Y Travel Limit in degrees.
Definition at line 73 of file cameraConf.H.
Referenced by CameraControl::moveCamTPFrame(), CameraControl::moveCamXYFrame(), CameraControl::tiltAbsolute(), and CameraControl::tiltRelative().
| unsigned int cameraConf::Ypixel |
size of field of view in pixels
Definition at line 30 of file cameraConf.H.
Referenced by CameraControl::moveCamXYFrame(), CameraControl::setImageSize(), segmentImageMerge2::SIMverganceSpring(), and segmentImageMerge::verganceSpring().
 1.6.3
1.6.3