
An application-wide data structure holding the occupancy grid used mainly for visualization and state communication between different behaviours. More...
#include "Robots/LoBot/slam/LoPose.H"#include "Robots/LoBot/ui/LoDrawable.H"#include "Robots/LoBot/thread/LoRWLock.H"#include "Robots/LoBot/thread/LoMutex.H"#include <vector>#include <utility>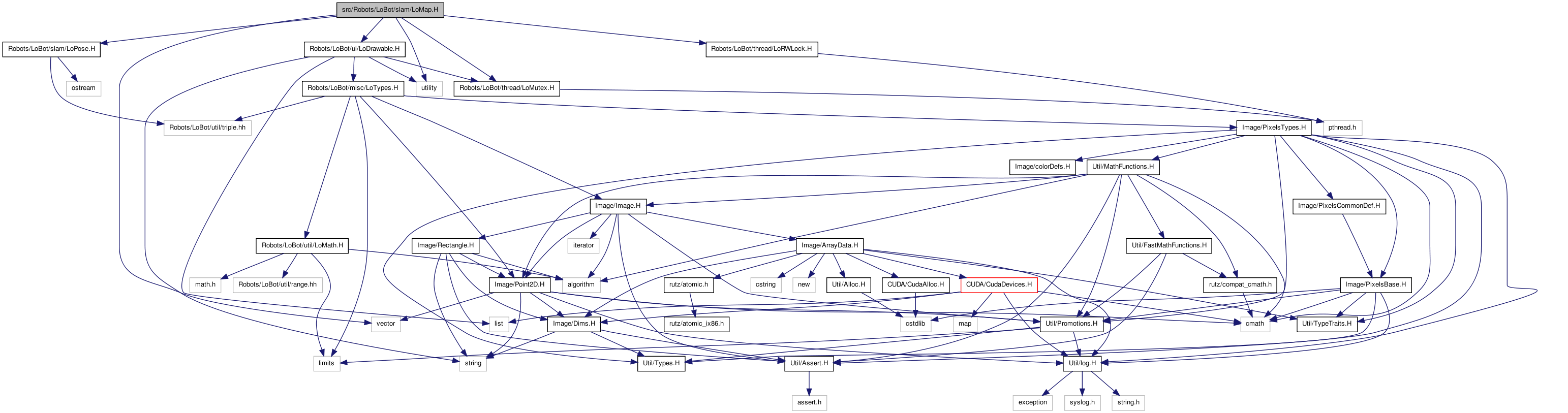

Go to the source code of this file.
Classes | |
| class | lobot::Map |
| An application-wide obstacle map. More... | |
An application-wide data structure holding the occupancy grid used mainly for visualization and state communication between different behaviours.
This file defines a class that implements an application-wide obstacle map for the Robolocust system. This map is an occupancy grid that holds probability values rather than simple 0/1 flags indicating the absence or presence of obstacles. The probabilities are represented as bytes ranging from 0 to 255. High values indicate free space while low values indicate obstacles.
In addition to the obstacle map, this data structure also holds the robot's current pose w.r.t. the map.
Definition in file LoMap.H.
 1.6.3
1.6.3