
Public Member Functions | |
Constructors and Destructors | |
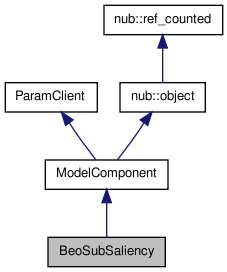
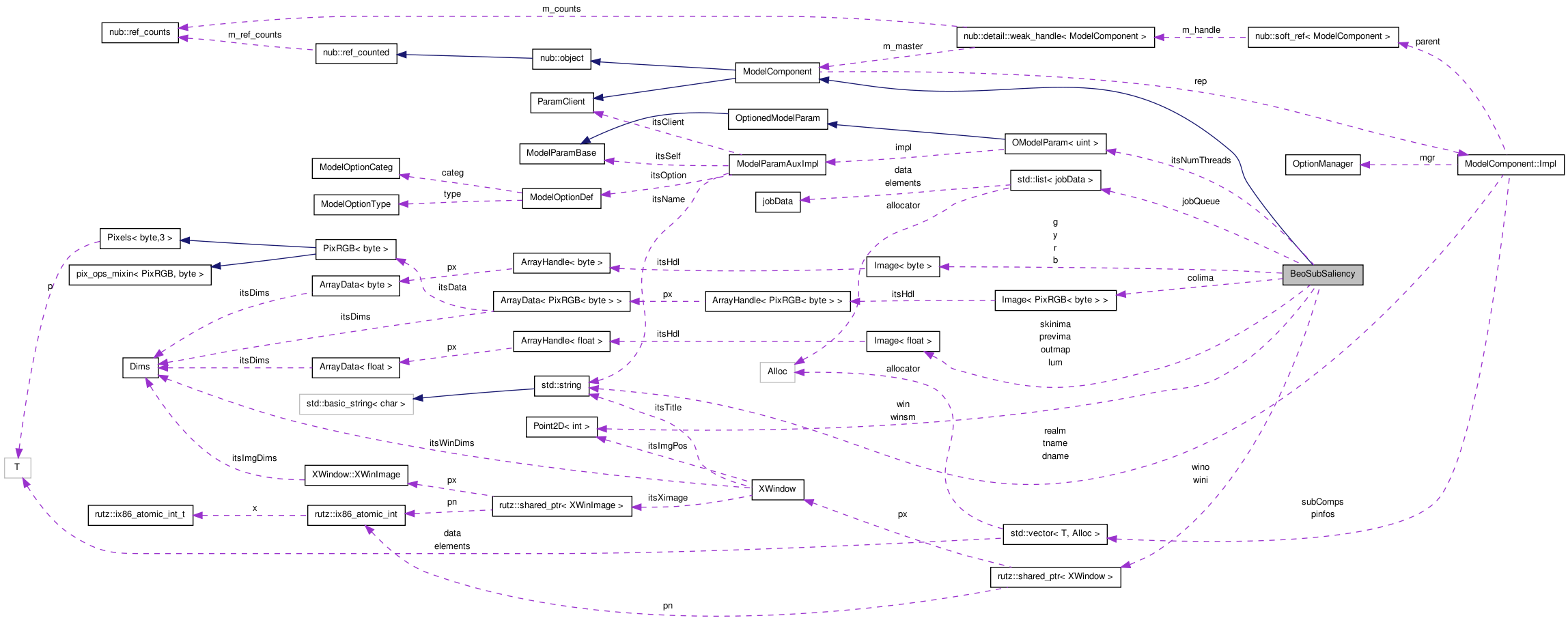
| BeoSubSaliency (OptionManager &mgr, const std::string &descrName="SaliencyMT", const std::string &tagName="SaliencyMT") | |
| Constructor. | |
| ~BeoSubSaliency () | |
| Destructor. | |
member functions | |
| Point2D< int > | run (Image< PixRGB< byte > > img, bool debug=false) |
| Setup up with image to be processed and build the job queue. | |
| void | computeCMAP () |
| Compute a conspicuity map from an image. | |
Protected Attributes | |
| OModelParam< uint > | itsNumThreads |
| Number of worker threads to use. | |
Definition at line 113 of file BeoSubSaliency.H.
| BeoSubSaliency::BeoSubSaliency | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "SaliencyMT", |
|||
| const std::string & | tagName = "SaliencyMT" | |||
| ) |
Constructor.
Definition at line 50 of file BeoSubSaliency.C.
References OModelParam< T >::getVal(), itsNumThreads, and MYLOGVERB.
| BeoSubSaliency::~BeoSubSaliency | ( | ) |
Destructor.
Definition at line 80 of file BeoSubSaliency.C.
| void BeoSubSaliency::computeCMAP | ( | ) |
Compute a conspicuity map from an image.
Definition at line 168 of file BeoSubSaliency.C.
References buildPyrGeneric(), centerSurround(), downSize(), FLICKER, Gaussian5, Image< T >::getDims(), Image< T >::getHeight(), getRGBY(), Image< T >::getWidth(), hueDistance(), Image< T >::initialized(), inplaceAddBGnoise(), maxNormalize(), MAXNORMMAX, MAXNORMMIN, Image< T >::resize(), VCXNORM_MAXNORM, and ZEROS.
Setup up with image to be processed and build the job queue.
Definition at line 86 of file BeoSubSaliency.C.
References Image< T >::clear(), drawDisk(), findMax(), FLICKER, Gaussian5, getMinMax(), Point2D< T >::i, inplaceNormalize(), quickInterpolate(), and rutz::shared_ptr< T >::reset().
OModelParam<uint> BeoSubSaliency::itsNumThreads [protected] |
Number of worker threads to use.
Definition at line 143 of file BeoSubSaliency.H.
Referenced by BeoSubSaliency().
 1.6.3
1.6.3