
A behaviour for getting the robot unstuck using the raw LGMD spikes and a virtual force field. More...
#include "Robots/LoBot/control/LoBehavior.H"#include "Robots/LoBot/misc/LoVector.H"#include "Robots/LoBot/misc/factory.hh"#include <vector>#include <utility>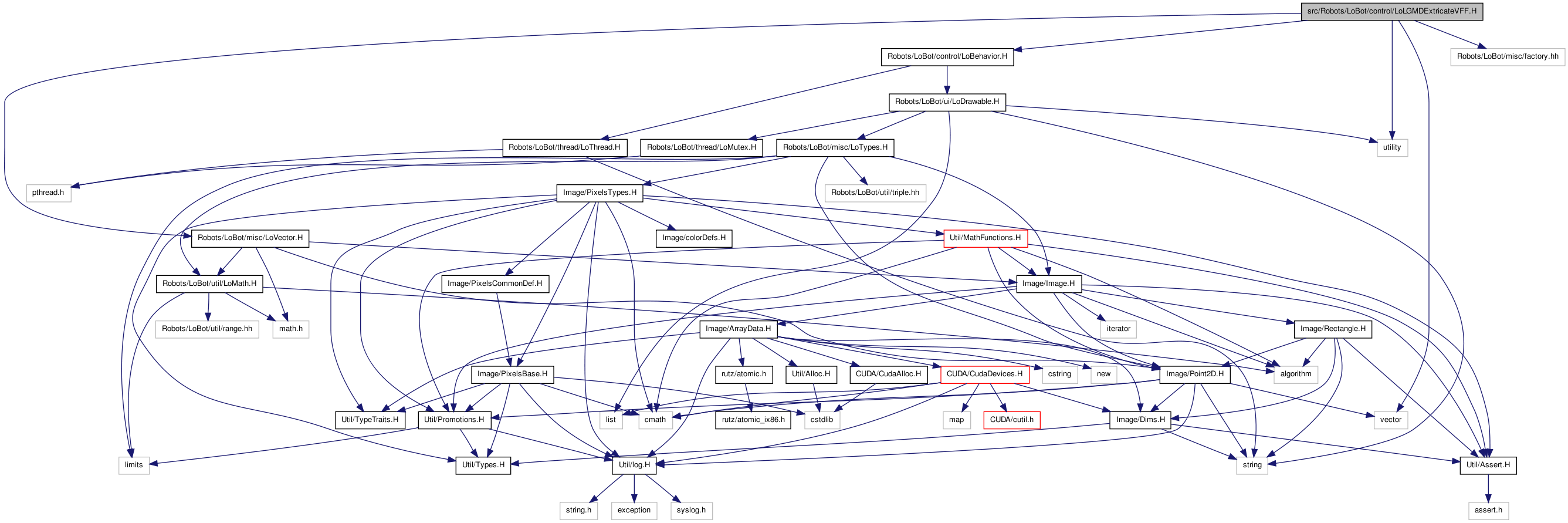

Go to the source code of this file.
Classes | |
| class | lobot::LGMDExtricateVFF |
| A behaviour for moving the robot away from obstacles by applying a virtual force field comprised of repulsive and attractive forces based on the raw LGMD inputs. More... | |
| struct | lobot::LGMDExtricateVFF::Command |
A behaviour for getting the robot unstuck using the raw LGMD spikes and a virtual force field.
This file defines a class that implements the virtual force field concept for moving lobot away from obstacles using raw LGMD spikes. What we mean by "raw" here is that this behaviour does not process the LGMD spikes in any way (e.g., time-to-impact state estimation or signal processing of any kind). Instead, the behaviour considers a spike rate threshold. When the spike rate for a locust exceeds this threshold, it is converted to a repulsive force along the direction in which that locust is looking. Similarly, spike rates below the threshold become attractive forces along their respective directions. The attractive and repulsive forces are then combined to produce a vector that is used to decide on an appropriate steering command.
Definition in file LoLGMDExtricateVFF.H.
 1.6.3
1.6.3