
The saliency map base class. More...
#include <Neuro/SaliencyMap.H>
Public Member Functions | |
Constructor, destructor, and reset | |
| SaliencyMap (OptionManager &mgr, const std::string &descrName="Saliency Map", const std::string &tagName="SaliencyMap") | |
| Ininitialized constructor. | |
| virtual | ~SaliencyMap () |
| Destructor. | |
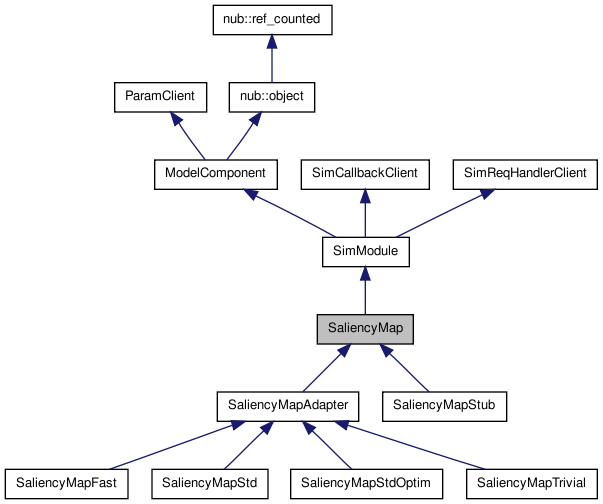
The saliency map base class.
This is a 2D salience map. It is just a base class with virtual function definitions. Various saliency maps are available below, which provide implementations for these virtual functions. The saliency map receives input through the input() function, and its current state (membrane potential of neurons) can be retrieved using getV(). Various inplementations will typically derive from class Image and inherit all the standard methods of class Image.
Definition at line 68 of file SaliencyMap.H.
| SaliencyMap::SaliencyMap | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "Saliency Map", |
|||
| const std::string & | tagName = "SaliencyMap" | |||
| ) |
Ininitialized constructor.
Definition at line 88 of file SaliencyMap.C.
| SaliencyMap::~SaliencyMap | ( | ) | [virtual] |
Destructor.
Definition at line 97 of file SaliencyMap.C.
 1.6.3
1.6.3