
A behaviour for getting the robot unstuck using LGMD spikes and a virtual force field based on a Bayesian time-to-impact state estimation loop. More...
#include "Robots/LoBot/control/LoBehavior.H"#include "Robots/LoBot/tti/LoTTIEstimator.H"#include "Robots/LoBot/lgmd/LocustModel.H"#include "Robots/LoBot/misc/LoVector.H"#include "Robots/LoBot/misc/factory.hh"#include <string>#include <vector>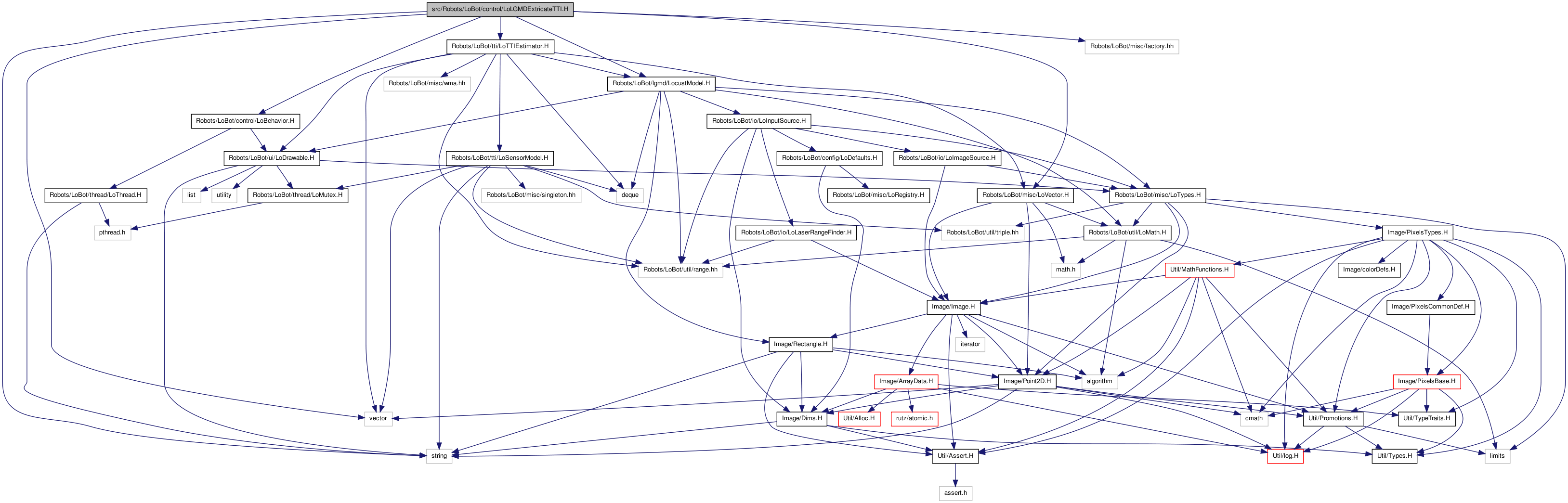

Go to the source code of this file.
Classes | |
| class | lobot::LGMDExtricateTTI |
| A behaviour for moving the robot away from obstacles by applying a virtual force field comprised of repulsive and attractive forces based on time-to-impact estimates derived from LGMD inputs. More... | |
| struct | lobot::LGMDExtricateTTI::Command |
A behaviour for getting the robot unstuck using LGMD spikes and a virtual force field based on a Bayesian time-to-impact state estimation loop.
This file defines a class that implements the virtual force field concept for moving lobot away from obstacles using time-to-impact estimates made using LGMD spikes.
As per the research by Gabbiani, et al., we know that LGMD spikes are related to the time-to-impact of approaching objects. Unfortunately, given a spike rate, we cannot easily determine the corresponding time-to-impact (TTI) because the spike rate function is non-invertible.
Thus, for each (actual or virtual) locust connected to the robot, this behaviour performs Bayesian state estimation in an attempt to determine the corresponding TTI given spike rate. Once we have TTI, we can use the velocity information returned by the robot's motor system to calculate a distance estimate for each locust. This would, in effect, allow us to use the locust array as a kind of range sensor.
These distance "readings" can then be used to construct a virtual force field comprised of repulsive and attractive forces just as we would do for a real range sensor.
Definition in file LoLGMDExtricateTTI.H.
 1.6.3
1.6.3