
A behaviour for getting the robot unstuck using the raw LGMD spikes and an array of elementary motion detectors. More...
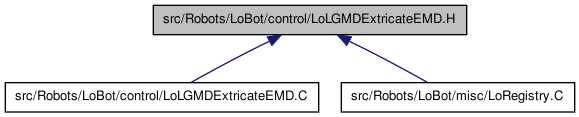
#include "Robots/LoBot/control/LoBehavior.H"#include "Robots/LoBot/lgmd/LocustModel.H"#include "Robots/LoBot/io/LoEMD.H"#include "Robots/LoBot/misc/LoVector.H"#include "Robots/LoBot/misc/factory.hh"#include <vector>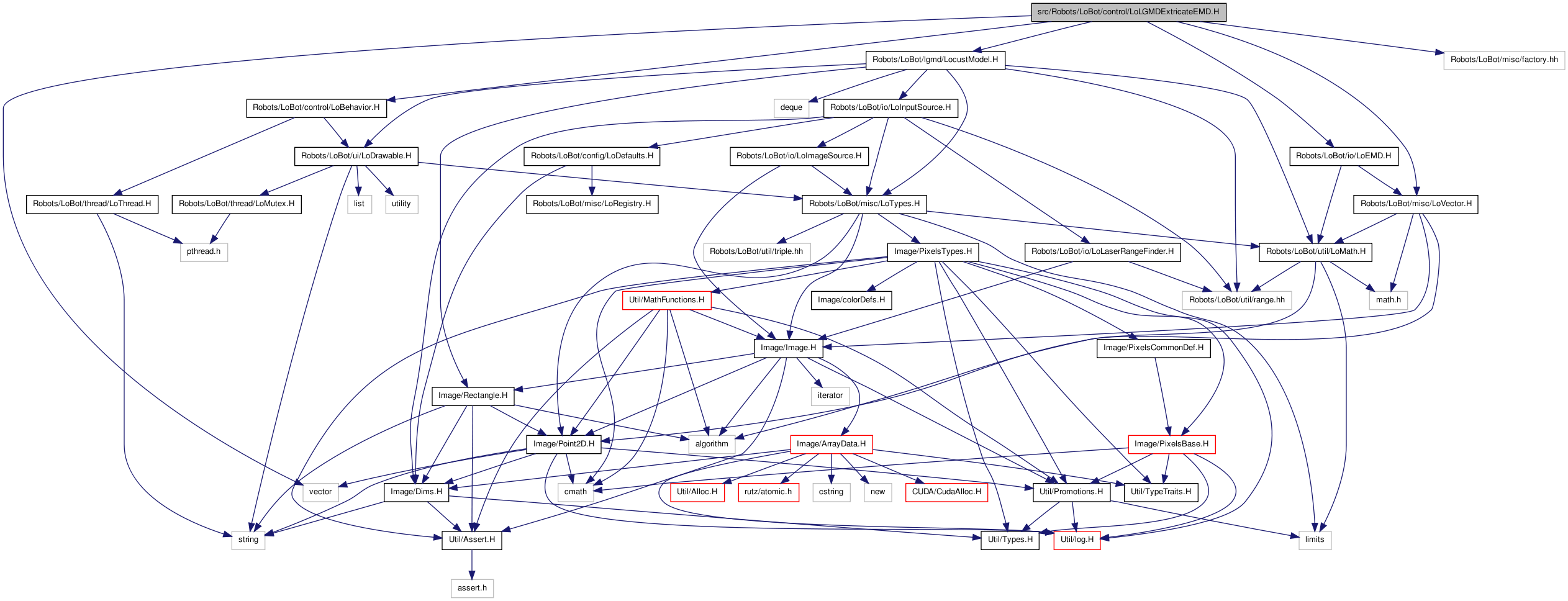
Go to the source code of this file.
Classes | |
| class | lobot::LGMDExtricateEMD |
| A behaviour for moving the robot away from obstacles by running the raw LGMD inputs via an EMD array. More... | |
| struct | lobot::LGMDExtricateEMD::Command |
A behaviour for getting the robot unstuck using the raw LGMD spikes and an array of elementary motion detectors.
This file defines a class that implements an array of Reichardt Elementary Motion Detectors that are wired into the LGMD's of lobot's locusts. The behaviour uses this EMD array to sense the direction in which maximal spiking activity is ocurring and to steer the robot away from approaching obstacles in that direction.
Definition in file LoLGMDExtricateEMD.H.
 1.6.3
1.6.3