
#include <stdlib.h>#include <time.h>#include <unistd.h>#include <fcntl.h>#include <sys/types.h>#include <sys/stat.h>#include <signal.h>#include "Image/ColorOps.H"#include "Image/MathOps.H"#include "Image/Image.H"#include "Image/ImageSet.H"#include "Image/Pixels.H"#include "Image/PyramidOps.H"#include "Image/ShapeOps.H"#include "Image/Transforms.H"#include "Image/fancynorm.H"#include "Util/Assert.H"#include "Util/Timer.H"#include "Util/Types.H"#include "Component/ModelManager.H"#include "Corba/Objects/BotArmControlSK.hh"#include "Corba/ImageOrbUtil.H"#include "Devices/Scorbot.H"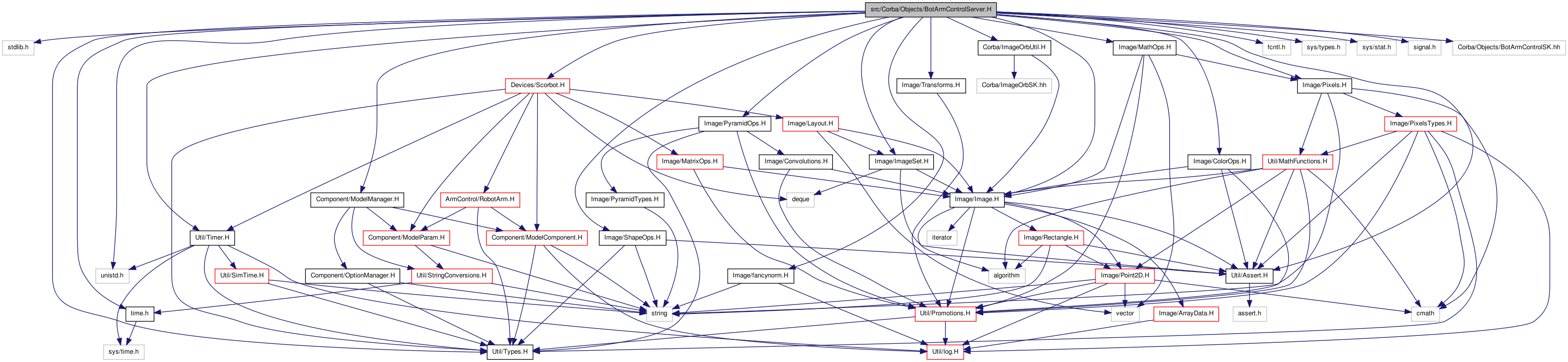

Go to the source code of this file.
Classes | |
| class | BotArmControlServer |
control a robot via corba
Definition in file BotArmControlServer.H.
 1.6.3
1.6.3