
Classes | |
| struct | GraphicsFlags |
| struct | InitializationState |
| struct | Particle |
| struct | SensorFlags |
| struct | SimulationState |
Public Member Functions | |
| ParticleFilter (int numStates, int numObservations, int numParticles) | |
| virtual Image< double > | getNextState (const Image< double > &X)=0 |
| The function to move from one state to another (need to be implemented). | |
| virtual Image< double > | getObservation (const Image< double > &X)=0 |
| The function to predict the observation from the current state. | |
| void | predictState () |
| Predict the next state and covariance. | |
| int | pickParticleToSample (void) |
| double | getLikelihood (const Image< double > &z, const Image< double > &X) |
| void | predictObservation () |
| Predict the observations. | |
| void | update (const Image< double > &z) |
| Update the state and covariance given the observation z. | |
| double | gaussianRand (void) |
| double | uniformRandom (void) |
| ParticleFilter (int id, OptionManager &mgr, XBox360RemoteControlI *controller, const std::string &descrName="ParticleFilter", const std::string &tagName="ParticleFilter") | |
| Constructor. | |
| ~ParticleFilter () | |
| Destructor. | |
| virtual void | evolve () |
| Main run loop. | |
| virtual void | updateMessage (const RobotSimEvents::EventMessagePtr &eMsg, const Ice::Current &) |
| Get a message. | |
| virtual void | registerTopics () |
| Component registers itself as publisher/subscriber to topic(s). | |
| void | simulateMovement (int mode, int movementMode, RobotSimEvents::BeeStemMotorControllerMessagePtr &msg) |
| void | startSimulation () |
| void | stopSimulation () |
| void | disableSimulation () |
Static Public Member Functions | |
| static void | getMotorControllerMsg (RobotSimEvents::BeeStemMotorControllerMessagePtr &msg, int mc0, int mc1, int mc2, int mc3, int mc4, int mc5, int mc6, int mc7, int mc8) |
Protected Attributes | |
| int | itsNumStates |
| int | itsNumObservations |
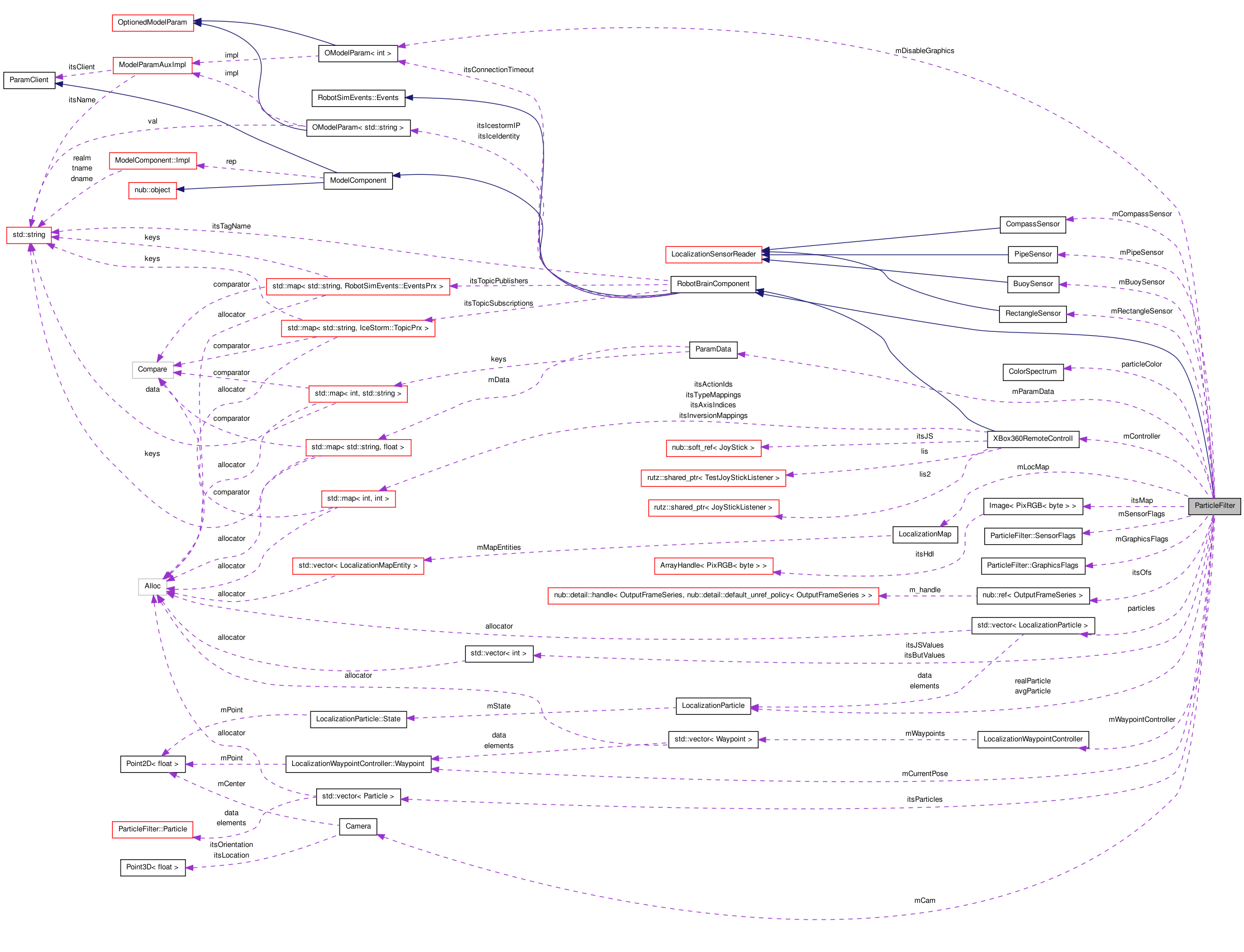
| std::vector< Particle > | itsParticles |
Definition at line 48 of file ParticleFilter.H.
| ParticleFilter::ParticleFilter | ( | int | id, | |
| OptionManager & | mgr, | |||
| XBox360RemoteControlI * | controller, | |||
| const std::string & | descrName = "ParticleFilter", |
|||
| const std::string & | tagName = "ParticleFilter" | |||
| ) |
Constructor.
Definition at line 31 of file ParticleFilter.C.
References ModelComponent::addSubComponent().
| ParticleFilter::~ParticleFilter | ( | ) |
Destructor.
| void ParticleFilter::evolve | ( | ) | [virtual] |
Main run loop.
Reimplemented from RobotBrainComponent.
Definition at line 989 of file ParticleFilter.C.
References OModelParam< T >::getVal(), and RobotBrainComponent::publish().
The function to move from one state to another (need to be implemented).
Implemented in ParticleTracker.
Referenced by predictState().
The function to predict the observation from the current state.
Implemented in ParticleTracker.
| void ParticleFilter::predictObservation | ( | ) |
Predict the observations.
| void ParticleFilter::predictState | ( | ) |
Predict the next state and covariance.
Definition at line 71 of file ParticleFilter.C.
References getNextState().
| void ParticleFilter::registerTopics | ( | ) | [virtual] |
Component registers itself as publisher/subscriber to topic(s).
Reimplemented from RobotBrainComponent.
Definition at line 303 of file ParticleFilter.C.
References OModelParam< T >::getVal(), RobotBrainComponent::registerPublisher(), and RobotBrainComponent::registerSubscription().
| void ParticleFilter::update | ( | const Image< double > & | z | ) |
Update the state and covariance given the observation z.
Definition at line 126 of file ParticleFilter.C.
| void ParticleFilter::updateMessage | ( | const RobotSimEvents::EventMessagePtr & | eMsg, | |
| const Ice::Current & | ||||
| ) | [virtual] |
Get a message.
Reimplemented from RobotBrainComponent.
Definition at line 1132 of file ParticleFilter.C.
 1.6.3
1.6.3