
A behaviour for steering the robot based on the open path algorithm. More...
#include "Robots/LoBot/control/LoBehavior.H"#include "Robots/LoBot/control/LoTurnArbiter.H"#include "Robots/LoBot/io/LoLRFData.H"#include "Robots/LoBot/misc/factory.hh"#include "Robots/LoBot/util/triple.hh"#include <map>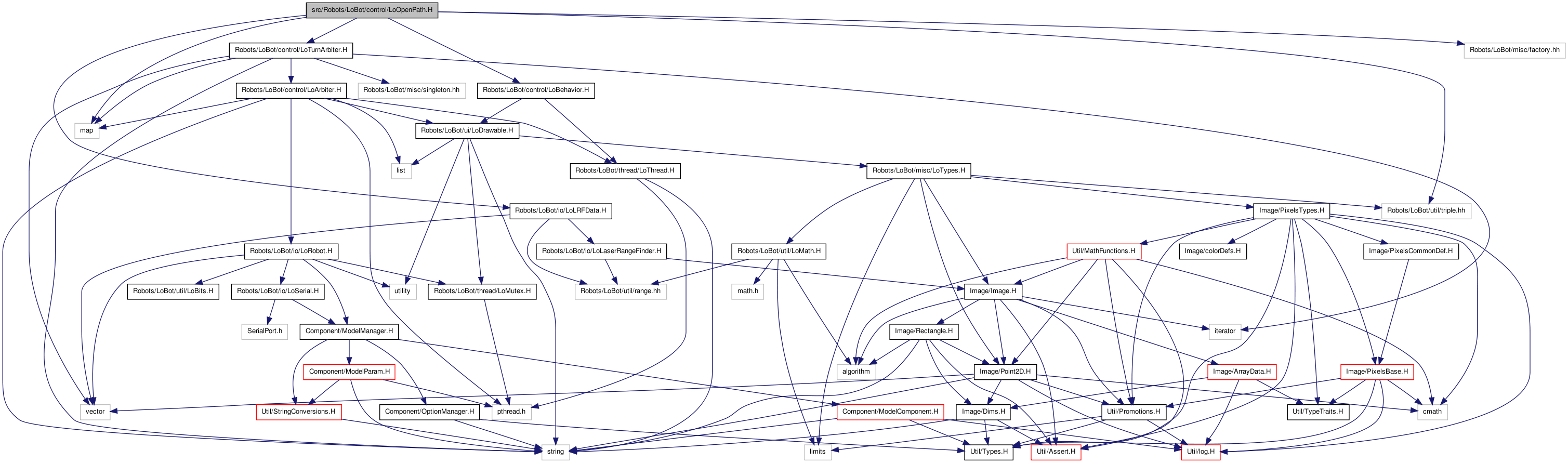

Go to the source code of this file.
Classes | |
| class | lobot::OpenPath |
| A behaviour for steering the robot toward the most open path that can accommodate it. More... | |
| class | lobot::OpenPath::PathInfo |
A behaviour for steering the robot based on the open path algorithm.
This file defines a class that implements the open path algorithm for steering the robot towards the longest open path that will accommodate the robot's width given the current set of distance readings from the laser range finder.
The open path algorithm is described in the following paper:
von Wahlde, R., Wiedenman, N., Brown, W. A., Viqueira, C. An Open-Path Obstacle Avoidance Algorithm Using Scanning Laser Range Data U. S. Army Research Laboratory, Report number ARL-MR-0715
The above paper is rather abstruse and unnecessarily complicated. This implementation uses the open path idea but does not follow the description in the paper.
Definition in file LoOpenPath.H.
 1.6.3
1.6.3