
A helper class for drawing markers to indicate distances on the LRF tester's main window. More...
#include "Robots/LoBot/ui/LoGLCanvas.H"#include "Robots/LoBot/misc/LoTypes.H"#include "Robots/LoBot/misc/singleton.hh"#include "Robots/LoBot/util/LoMath.H"#include "Robots/LoBot/util/triple.hh"#include "Robots/LoBot/util/range.hh"#include <vector>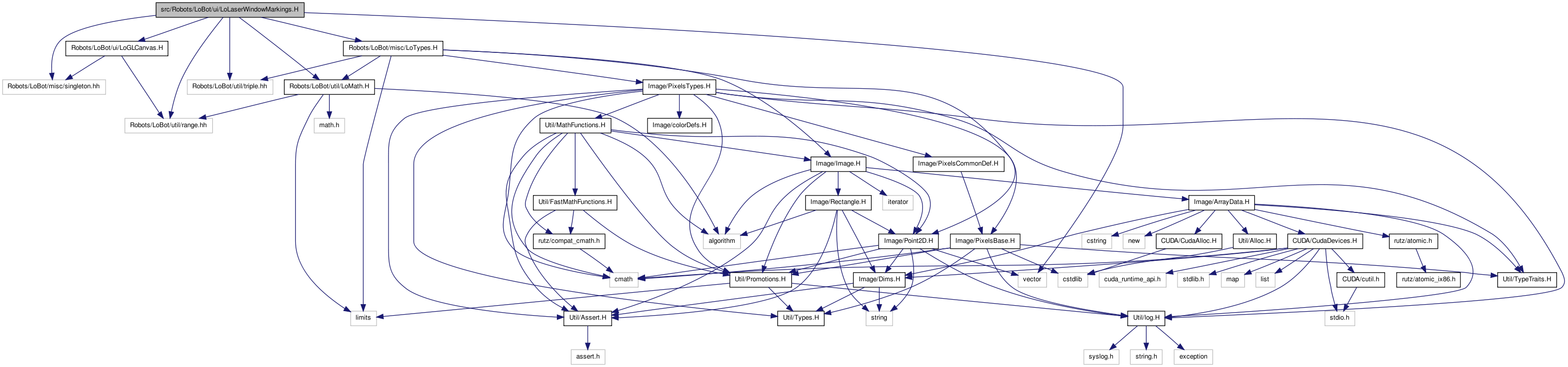

Go to the source code of this file.
Classes | |
| class | lobot::LaserWindowMarkings |
| A helper class for drawing markers indicating distances. More... | |
| class | lobot::LaserWindowMarkings::Params |
A helper class for drawing markers to indicate distances on the LRF tester's main window.
This file defines an abstract base class for a helper object that draws markers of some sort within the LRF test program's window. These markers indicate distances at regular intervals.
For example, we can have markings every 100, 500, 1000 and 5000 mm. Each of these markings can be drawn in a different color. Thus, the 100 mm markings can be one color, the 500 mm markings another color, the 1000 mm markings yet another color, and, finally the 5000 mm markings in a fourth color. Furthermore, we can also specify the zoom ranges at which the 100, 500, 1000 and 5000 mm markings should be visible.
This helps make the laser range finder's distance measurements more readable and easier to interpret.
Definition in file LoLaserWindowMarkings.H.
 1.6.3
1.6.3