
#include "Component/ModelManager.H"#include "Devices/PingSonar.H"#include "Util/log.H"#include "Util/Types.H"#include "Util/sformat.H"#include "Image/DrawOps.H"#include "Media/FrameSeries.H"#include "Transport/FrameInfo.H"#include "Raster/GenericFrame.H"#include <stdio.h>#include <cstring>#include <cstdlib>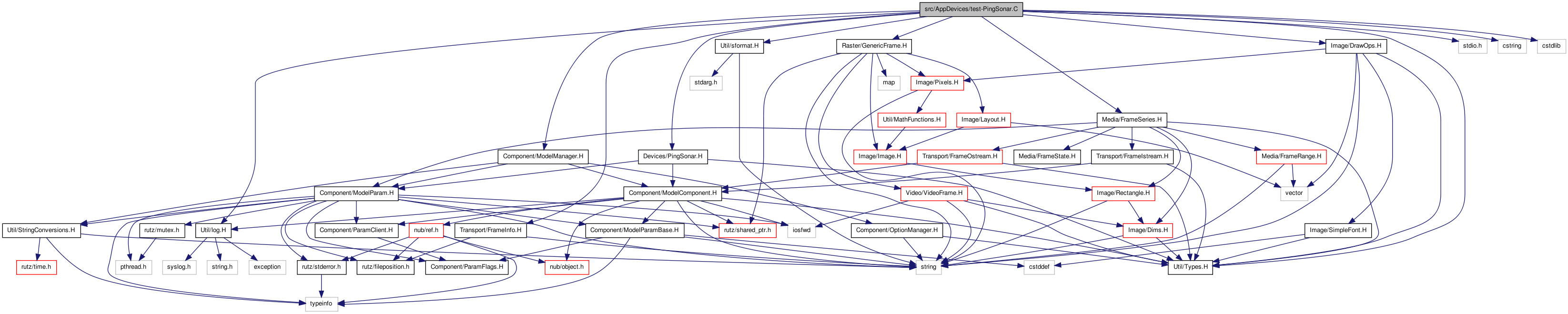
Go to the source code of this file.
Functions | |
| Image< PixRGB< byte > > | vizDist (std::vector< int > dists, int divisions) |
| Visualize distance received from sensor. | |
| int | main (int argc, const char **argv) |
test the ping sonar device
Definition in file test-PingSonar.C.
| Image<PixRGB<byte> > vizDist | ( | std::vector< int > | dists, | |
| int | divisions | |||
| ) |
Visualize distance received from sensor.
Definition at line 54 of file test-PingSonar.C.
References drawPoint(), Point2D< T >::i, sformat(), writeText(), and ZEROS.
 1.6.3
1.6.3