
#include "BayesFilters/ParticleFilter.H"#include "Component/ModelManager.H"#include "Raster/GenericFrame.H"#include "Image/Layout.H"#include "Image/MatrixOps.H"#include "Image/DrawOps.H"#include "GUI/DebugWin.H"#include "Util/MathFunctions.H"#include "Media/FrameSeries.H"#include "Transport/FrameInfo.H"#include "Image/Point3D.H"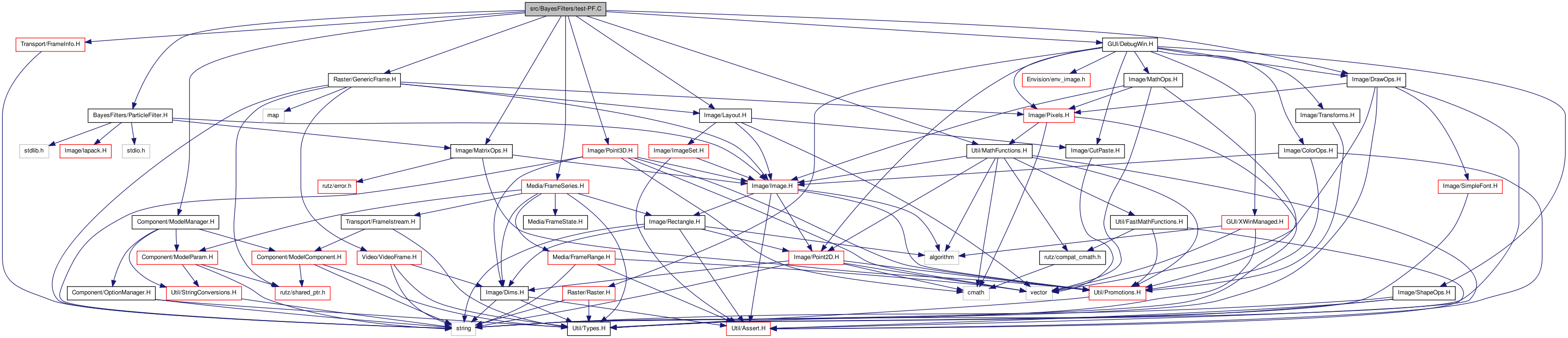
Go to the source code of this file.
Classes | |
| class | ParticleTracker |
Functions | |
| std::vector< int > | getIntervals (int n, int polyDegree) |
| double | blend (int k, int t, std::vector< int > &intervals, double v) |
| double | getWeight (int k, double s) |
| void | drawBSpline (std::vector< Point3D< float > > &controlPoints) |
| int | main (int argc, char *argv[]) |
test the filter
Definition in file test-PF.C.
| int main | ( | int | argc, | |
| char * | argv[] | |||
| ) |
B Spline
Definition at line 213 of file test-PF.C.
References ModelComponent::addSubComponent(), ModelManager::parseCommandLine(), UKF::predictState(), ModelComponent::start(), UKF::update(), and ZEROS.
 1.6.3
1.6.3