
A behaviour for getting the robot unstuck when the emergency stop behaviour commands a full stop because stuff has gotten too close for comfort. More...
#include "Robots/LoBot/control/LoBehavior.H"#include "Robots/LoBot/misc/LoVector.H"#include "Robots/LoBot/misc/factory.hh"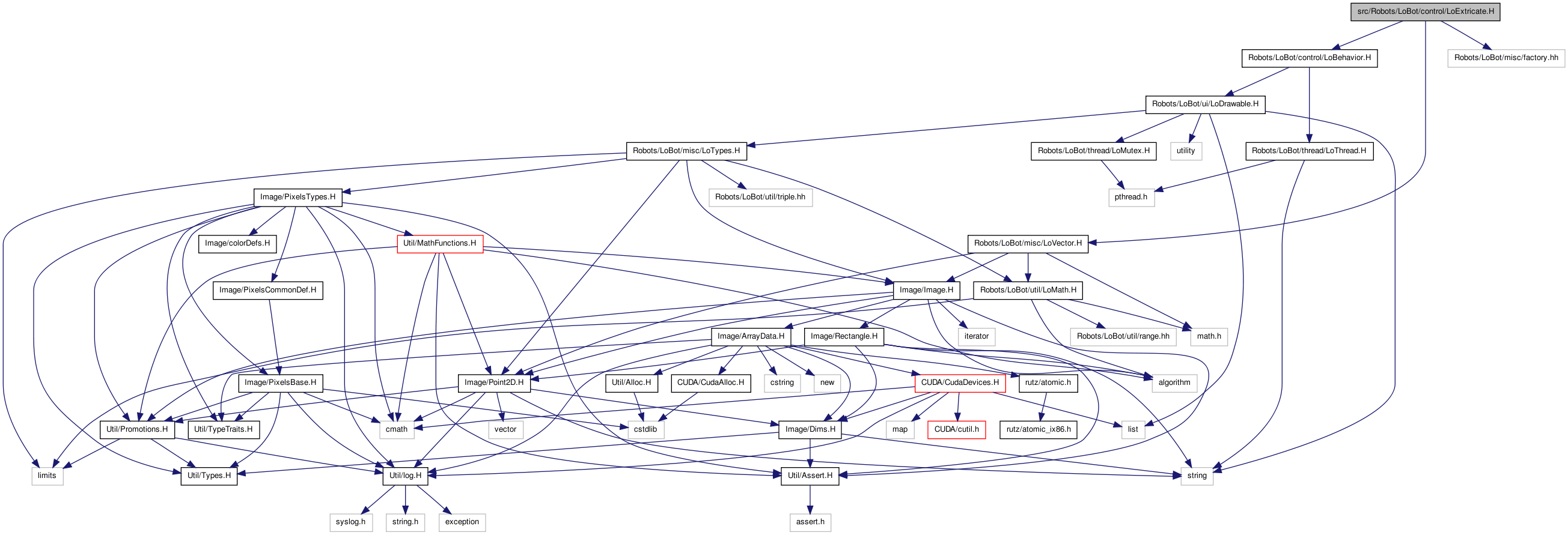
Go to the source code of this file.
Classes | |
| class | lobot::Extricate |
| A behaviour for unsticking the robot after the emergency stop behaviour stops it dead in its tracks because things have gotten too close for comfort. More... | |
| struct | lobot::Extricate::Command |
A behaviour for getting the robot unstuck when the emergency stop behaviour commands a full stop because stuff has gotten too close for comfort.
Definition in file LoExtricate.H.
 1.6.3
1.6.3