
#include "Image/OpenCVUtil.H"#include "Component/ModelManager.H"#include "Media/FrameSeries.H"#include "Image/Image.H"#include "Image/CutPaste.H"#include "Image/ColorOps.H"#include "Image/MathOps.H"#include "Image/FilterOps.H"#include "Image/ShapeOps.H"#include "Image/Pixels.H"#include "Raster/Raster.H"#include "Image/MatrixOps.H"#include "Util/Timer.H"#include <stdio.h>#include "Robots/Beobot2/Navigation/FOE_Navigation/FoeDetector.H"#include "Robots/Beobot2/Navigation/FOE_Navigation/MotionOps.H"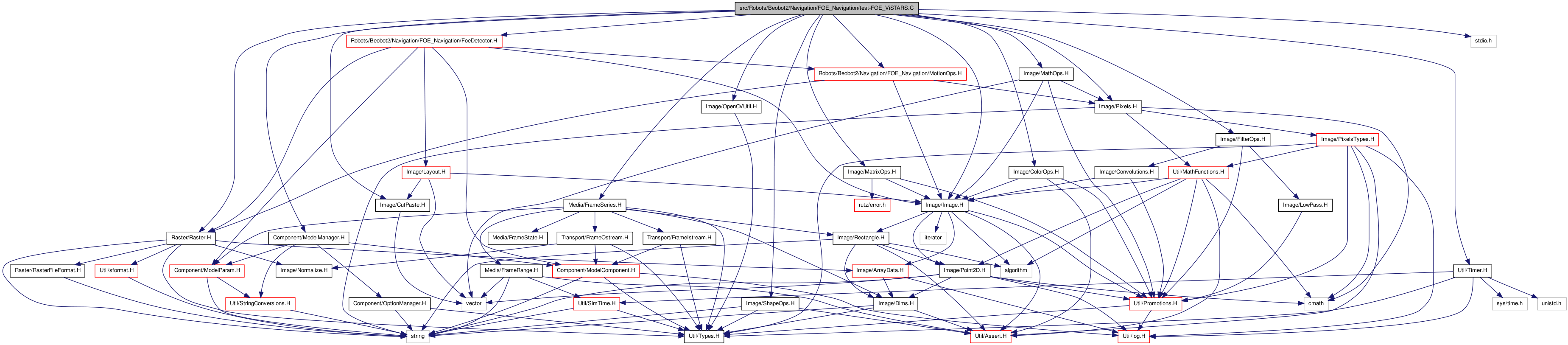
Go to the source code of this file.
Classes | |
| struct | ViSTARSmodelState |
| struct | ViSTARSmodel |
Defines | |
| #define | NUM_DIRS 8 |
| #define | NUM_CS 2 |
Functions | |
| Point2D< int > | getFOE (ViSTARSmodel &model, Image< double > stim) |
| void | updateFrame (ViSTARSmodel &model, Image< double > stim) |
| Point2D< int > | bgm_2007 (ViSTARSmodel &model) |
| std::vector< Image< double > > | sumFxyI (Image< double > F, std::vector< Image< double > > I) |
| Image< double > | combine (Image< double > y, double f) |
| std::vector< Image< double > > | sumLxy (rutz::shared_ptr< std::vector< Image< double > > > L, std::vector< Image< double > > I) |
| std::vector< Image< double > > | sumRz (std::vector< double > R, rutz::shared_ptr< std::vector< std::vector< Image< double > > > > w) |
| std::vector< Image< double > > | sumvD (std::vector< double >v, std::vector< Image< double > > I) |
| int | dof (int x) |
| Image< double > | filter2 (Image< double > f, Image< double > d) |
| void | report (ViSTARSmodel &model) |
| ViSTARSmodel | setupParams (uint comp, Dims size) |
|
std::pair< rutz::shared_ptr < std::vector< std::vector < Image< double > > > >, std::vector< Point2D < int > > > | generate_w (Dims sz, std::vector< double > vert_pos, uint horz_spac, uint scale) |
|
rutz::shared_ptr< std::vector < Image< double > > > | generate_L (double l, double sigx, double sigy, double k) |
| void | initializeModel (ViSTARSmodel &model, Image< double > stim) |
| Image< double > | shrink (Image< double > y, double f) |
| double | min (double a, double b) |
| double | max (double a, double b) |
| int | main (const int argc, const char **argv) |
Variables | |
| double | tstep = .1 |
| uint | mainIndex = 0 |
find the FOE using Browning 2009
Definition in file test-FOE_ViSTARS.C.
 1.6.3
1.6.3