
Classes | |
| struct | Pose |
Public Member Functions | |
| HeliPose (OptionManager &mgr, nub::ref< InputFrameSeries > &ifs, nub::ref< OutputFrameSeries > &ofs, const std::string &descrName="HeliPose", const std::string &tagName="HeliPose") | |
| Constructor. | |
| ~HeliPose () | |
| Destructor. | |
| void | run_cameraPose () |
| This method should not be called (implements thread code). | |
| void | run_imuPose () |
| void | init () |
| init the thread and connect to the HeliPose | |
| Pose | getPose () |
| Get sensor data. | |
| std::vector< Point2D< int > > | getExtrinsic (Image< byte > &img) |
| Get the extrinsic pose. | |
| std::vector< Point2D< int > > | getExtrinsic (Image< PixRGB< byte > > &img) |
| Get the extrinsic pose. | |
| void | displayExtrinsic (Image< byte > &img) |
| Show a grid on the image based on the pose. | |
| Image< PixRGB< byte > > | getImg () |
| void | getIMUBias () |
| Calculate the IMu mean an std as rest. | |
Protected Member Functions | |
| void | start1 () |
| get started (see ModelComponent.H) | |
| void | start2 () |
| get started (see ModelComponent.H) | |
| void | stop1 () |
| get stopped (see ModelComponent.H) | |
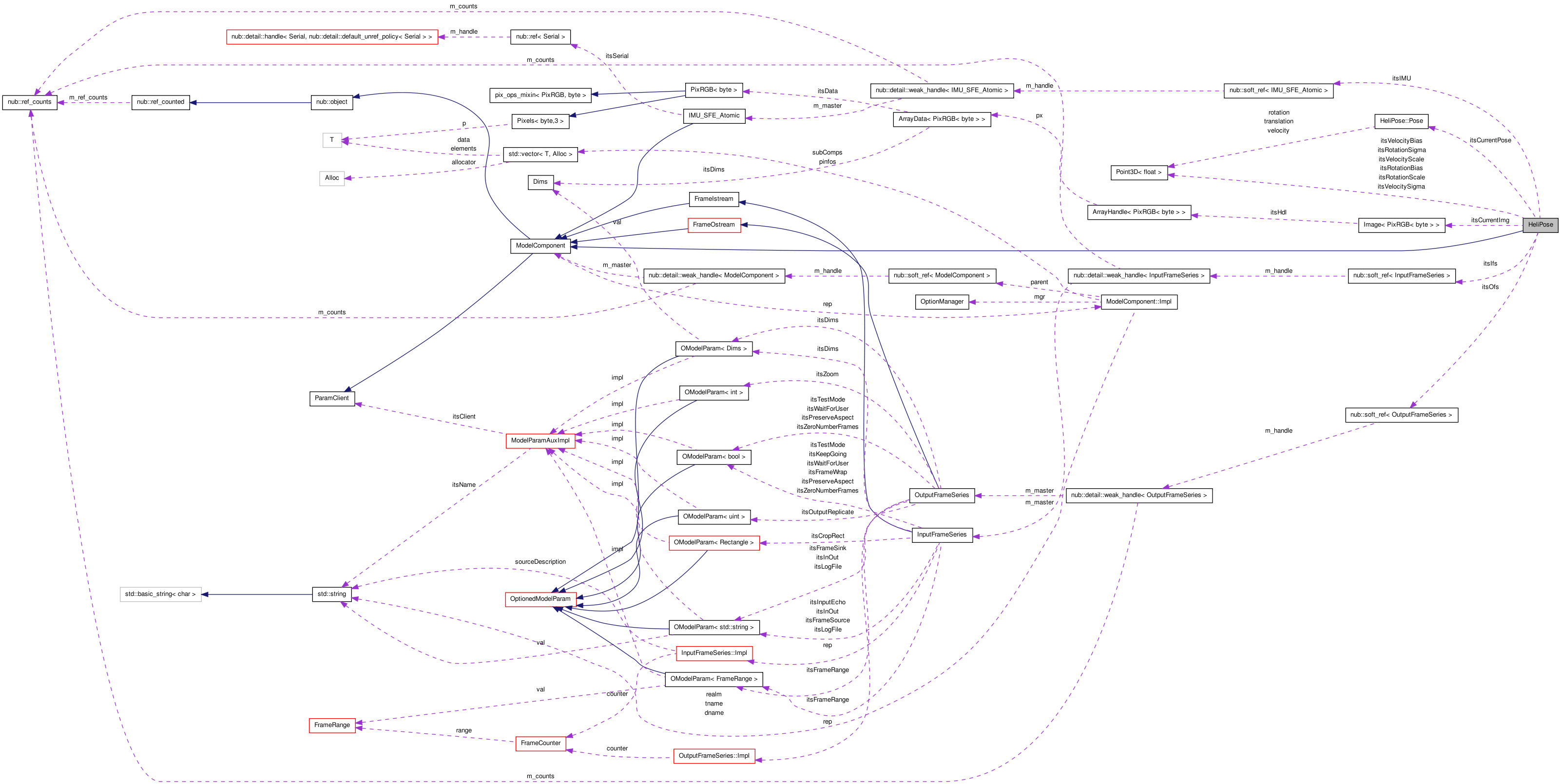
Definition at line 54 of file HeliPose.H.
| HeliPose::HeliPose | ( | OptionManager & | mgr, | |
| nub::ref< InputFrameSeries > & | ifs, | |||
| nub::ref< OutputFrameSeries > & | ofs, | |||
| const std::string & | descrName = "HeliPose", |
|||
| const std::string & | tagName = "HeliPose" | |||
| ) |
Constructor.
Definition at line 259 of file HeliPose.C.
References ModelComponent::addSubComponent(), and Point3D< T >::x.
| HeliPose::~HeliPose | ( | ) |
Destructor.
Definition at line 343 of file HeliPose.C.
Show a grid on the image based on the pose.
Definition at line 462 of file HeliPose.C.
References img2ipl().
| std::vector< Point2D< int > > HeliPose::getExtrinsic | ( | Image< PixRGB< byte > > & | img | ) |
Get the extrinsic pose.
Definition at line 409 of file HeliPose.C.
| std::vector< Point2D< int > > HeliPose::getExtrinsic | ( | Image< byte > & | img | ) |
| void HeliPose::getIMUBias | ( | ) |
Calculate the IMu mean an std as rest.
Definition at line 680 of file HeliPose.C.
References onlineMean(), and Point3D< T >::x.
| HeliPose::Pose HeliPose::getPose | ( | ) |
Get sensor data.
Definition at line 529 of file HeliPose.C.
| void HeliPose::init | ( | ) |
init the thread and connect to the HeliPose
| void HeliPose::run_cameraPose | ( | ) |
This method should not be called (implements thread code).
Definition at line 548 of file HeliPose.C.
References drawCircle(), Point2D< T >::i, and SRC_POS.
| void HeliPose::start1 | ( | ) | [protected, virtual] |
get started (see ModelComponent.H)
Reimplemented from ModelComponent.
Definition at line 323 of file HeliPose.C.
| void HeliPose::start2 | ( | ) | [protected, virtual] |
get started (see ModelComponent.H)
Reimplemented from ModelComponent.
Definition at line 328 of file HeliPose.C.
| void HeliPose::stop1 | ( | ) | [protected, virtual] |
get stopped (see ModelComponent.H)
Reimplemented from ModelComponent.
Definition at line 335 of file HeliPose.C.
 1.6.3
1.6.3