
#include "Image/OpenCVUtil.H"#include "Component/ModelManager.H"#include "Image/Image.H"#include "Image/Pixels.H"#include "Image/ColorOps.H"#include "Image/ShapeOps.H"#include "Image/MathOps.H"#include "Image/CutPaste.H"#include "Image/Transforms.H"#include "Media/FrameSeries.H"#include "Raster/Raster.H"#include "Util/log.H"#include "Util/Timer.H"#include "Learn/SOFM.H"#include "GUI/XWinManaged.H"#include "CMapDemo/SaliencyCMapMT.H"#include "SIFT/ScaleSpace.H"#include "SIFT/VisualObject.H"#include "SIFT/Keypoint.H"#include "SIFT/VisualObjectDB.H"#include "Image/FourierEngine.H"#include "RCBot/Motion/MotionEnergy.H"#include <signal.h>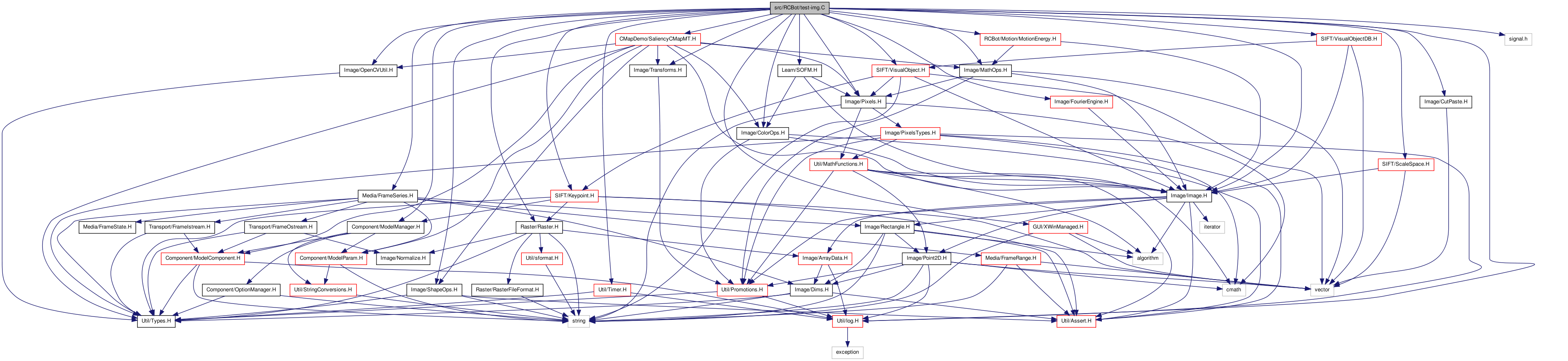
Go to the source code of this file.
Classes | |
| struct | KeyPoint |
Defines | |
| #define | NAVG 20 |
| Number of frames over which average framerate is computed. | |
| #define | ROI_SIZE 10 |
Functions | |
| void | terminate (int s) |
| Signal handler (e.g., for control-C). | |
| std::vector< KeyPoint > * | getKeypoints (Image< float > &ima) |
| double | compImg (std::vector< rutz::shared_ptr< Keypoint > > &obj1, std::vector< rutz::shared_ptr< Keypoint > > &obj2) |
| int | main (int argc, char **argv) |
Variables | |
| static bool | goforever = true |
| ImageSet< float > | bias (14) |
| ImageSet< float > | cmap1 (14) |
| ImageSet< float > | cmap2 (14) |
Definition in file test-img.C.
| #define NAVG 20 |
Number of frames over which average framerate is computed.
Definition at line 66 of file test-img.C.
| void terminate | ( | int | s | ) |
Signal handler (e.g., for control-C).
Definition at line 70 of file test-img.C.
References goforever.
 1.6.3
1.6.3