
A behaviour for collecting performance metrics. More...
#include "Robots/LoBot/control/LoBehavior.H"#include "Robots/LoBot/thread/LoMutex.H"#include "Robots/LoBot/misc/factory.hh"#include <sstream>#include <string>#include <vector>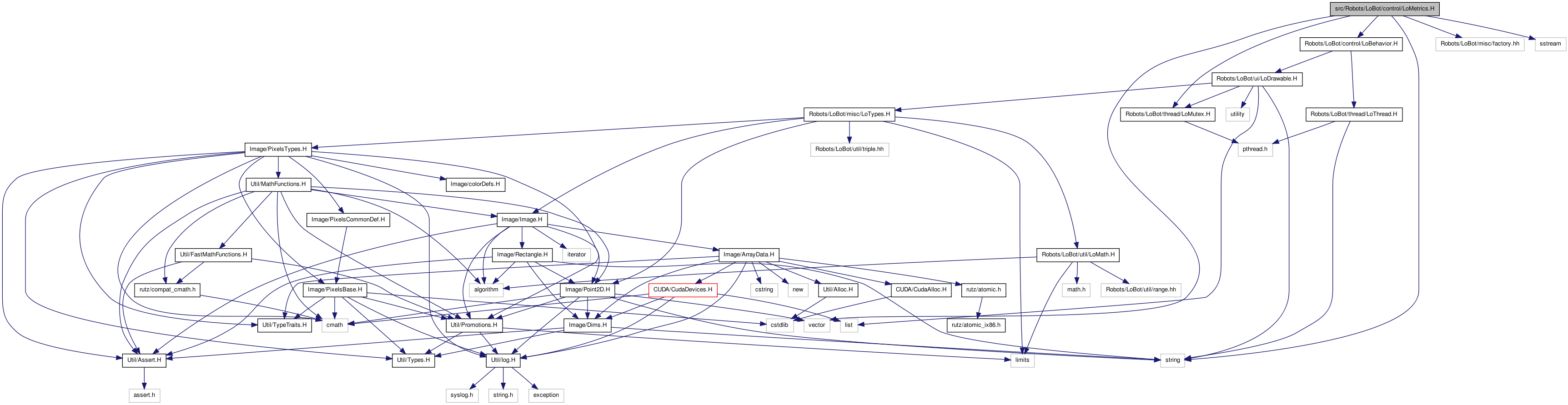

Go to the source code of this file.
Classes | |
| class | lobot::Metrics |
| A behaviour for gathering performance metrics about the robot. More... | |
| struct | lobot::Metrics::endl |
| struct | lobot::Metrics::newl |
| class | lobot::Metrics::Log |
| A class for creating metrics related log messages and buffering them with the metrics behaviour for subsequent output to the log file. More... | |
Functions | |
| Metrics::Log & | lobot::operator<< (Metrics::Log &metlog, const Metrics::endl &) |
| Metrics::Log & | lobot::operator<< (Metrics::Log &metlog, const Metrics::newl &) |
A behaviour for collecting performance metrics.
This file defines a class that implements a behaviour for gathering all sorts of useful data as lobot runs. For example, we can get information such as the robot's pose history, the time at which a goal is reached, average speed of the robot, number of emergency stop and extrication events, actual and predicted times-to-impact, and so on. All this data is periodically written to a log file, which can then be analyzed off-line.
Definition in file LoMetrics.H.
 1.6.3
1.6.3