
Interface for driving the iRobot's Create/Roomba via its Command Module (hence the CM in the class name). More...
#include "Robots/LoBot/io/LoRobot.H"#include "Robots/LoBot/io/LoSerial.H"#include "Robots/LoBot/thread/LoMutex.H"#include "Robots/LoBot/thread/LoThread.H"#include "Robots/LoBot/misc/factory.hh"#include "Robots/LoBot/misc/wma.hh"#include "Robots/LoBot/irccm/LoCMInterface.h"#include "Component/ModelManager.H"#include <string>#include <queue>#include <memory>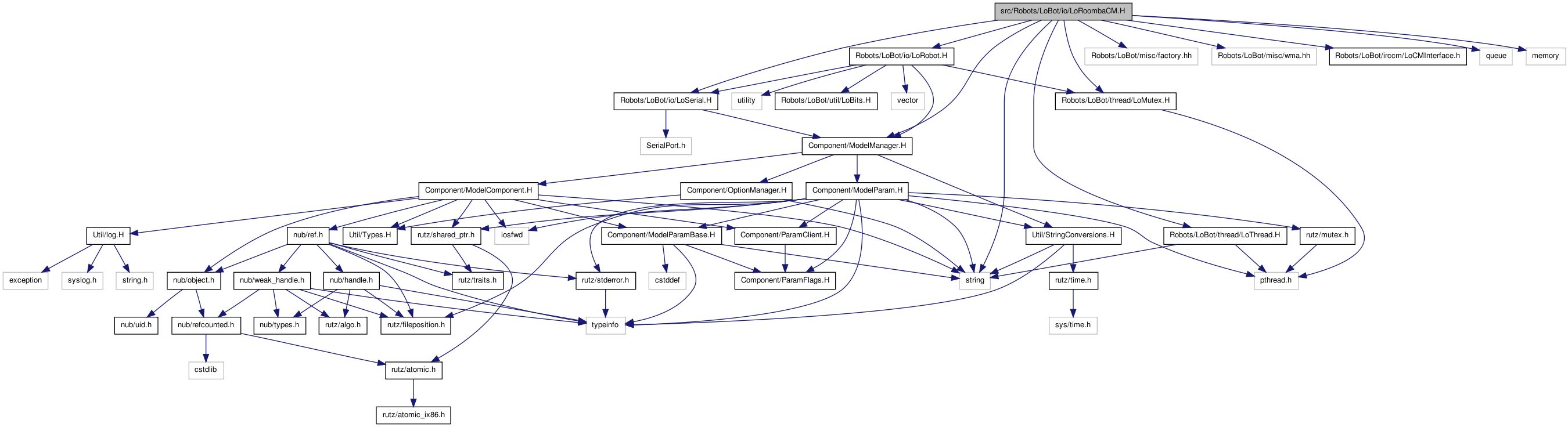
Go to the source code of this file.
Classes | |
| class | lobot::RoombaCM |
| High-level API for driving and steering the Roomba and retrieving its sensor data. More... | |
| class | lobot::RoombaCM::Comm |
| struct | lobot::RoombaCM::Comm::Cmd |
| struct | lobot::RoombaCM::Comm::Sensors |
Interface for driving the iRobot's Create/Roomba via its Command Module (hence the CM in the class name).
This file defines a class that implements the sensorimotor interface defined in LoRobot.H for the Create/Roomba.
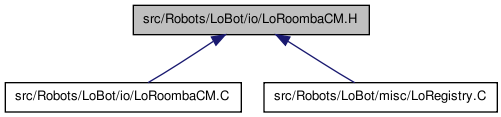
Definition in file LoRoombaCM.H.
 1.6.3
1.6.3