
The standard task-relevance map. More...
#include <Neuro/TaskRelevanceMap.H>
Public Member Functions | |
| TaskRelevanceMapStd (OptionManager &mgr, const std::string &descrName="Task-Relevance Map Std", const std::string &tagName="TaskRelevanceMapStd") | |
| Uninitialized constructor. | |
| virtual | ~TaskRelevanceMapStd () |
| Destructor. | |
Protected Member Functions | |
| virtual void | inputFrame (const InputFrame &f) |
| Called when a new input frame is available from the Retina. | |
| virtual void | saccadicSuppression (const bool on) |
| Some TRM implementations will reset their memory upon saccade. | |
| virtual void | integrate (SimEventQueue &q) |
| Integrate for one time step. | |
Protected Attributes | |
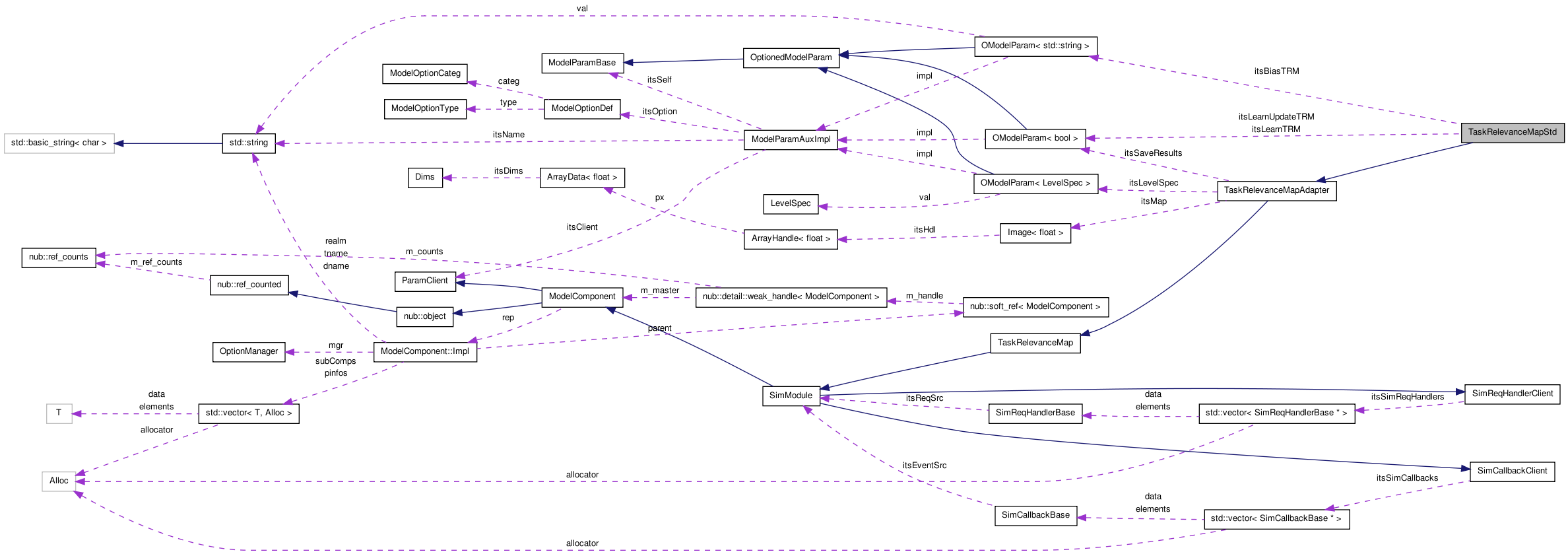
| OModelParam< bool > | itsLearnTRM |
| Learn the TRM for the given task by inspecting several scenes. | |
| OModelParam< bool > | itsLearnUpdateTRM |
| Learn and update the TRM as we inspecting several scenes. | |
| OModelParam< std::string > | itsBiasTRM |
| If an image is specified with this option, then use it to bias the TRM. | |
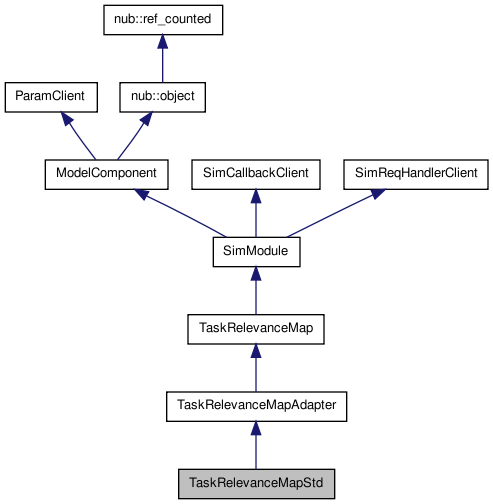
The standard task-relevance map.
This is our current standard TRM implementation. It is very incomplete as there is no good way to actually change relevance of anything. It will need in future work to be connected to an agent that computes the relevance of fixated locations and feeds that to the TRM.
Definition at line 219 of file TaskRelevanceMap.H.
| TaskRelevanceMapStd::TaskRelevanceMapStd | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "Task-Relevance Map Std", |
|||
| const std::string & | tagName = "TaskRelevanceMapStd" | |||
| ) |
Uninitialized constructor.
Definition at line 283 of file TaskRelevanceMap.C.
| TaskRelevanceMapStd::~TaskRelevanceMapStd | ( | ) | [virtual] |
Destructor.
Definition at line 292 of file TaskRelevanceMap.C.
| void TaskRelevanceMapStd::inputFrame | ( | const InputFrame & | f | ) | [protected, virtual] |
Called when a new input frame is available from the Retina.
Implements TaskRelevanceMapAdapter.
Definition at line 296 of file TaskRelevanceMap.C.
| void TaskRelevanceMapStd::integrate | ( | SimEventQueue & | q | ) | [protected, virtual] |
Integrate for one time step.
Implements TaskRelevanceMapAdapter.
Definition at line 321 of file TaskRelevanceMap.C.
| void TaskRelevanceMapStd::saccadicSuppression | ( | const bool | on | ) | [protected, virtual] |
Some TRM implementations will reset their memory upon saccade.
Implements TaskRelevanceMapAdapter.
Definition at line 317 of file TaskRelevanceMap.C.
OModelParam<std::string> TaskRelevanceMapStd::itsBiasTRM [protected] |
If an image is specified with this option, then use it to bias the TRM.
Definition at line 239 of file TaskRelevanceMap.H.
OModelParam<bool> TaskRelevanceMapStd::itsLearnTRM [protected] |
Learn the TRM for the given task by inspecting several scenes.
Definition at line 233 of file TaskRelevanceMap.H.
OModelParam<bool> TaskRelevanceMapStd::itsLearnUpdateTRM [protected] |
Learn and update the TRM as we inspecting several scenes.
Definition at line 236 of file TaskRelevanceMap.H.
 1.6.3
1.6.3