
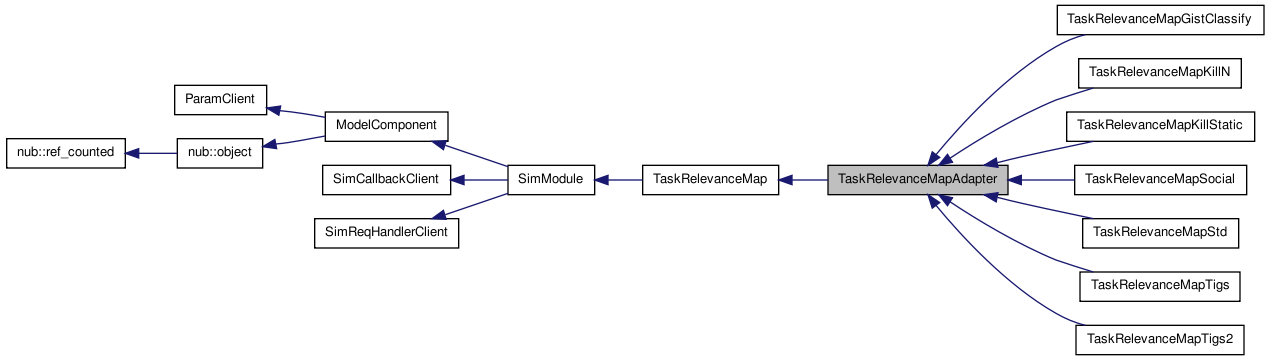
Partial implementation of TaskRelevanceMap for further derivation. More...
#include <Neuro/TaskRelevanceMap.H>
Public Member Functions | |
| TaskRelevanceMapAdapter (OptionManager &mgr, const std::string &descrName, const std::string &tagName) | |
| Constructor. | |
| virtual | ~TaskRelevanceMapAdapter () |
| Destructor. | |
Protected Member Functions | |
| SIMCALLBACK_DECLARE (TaskRelevanceMapAdapter, SimEventRetinaImage) | |
| Callback for when a new input frame is available from the retina. | |
| SIMCALLBACK_DECLARE (TaskRelevanceMapAdapter, SimEventSaccadeStatusEye) | |
| Callback for when a new eye activity is going on. | |
| SIMCALLBACK_DECLARE (TaskRelevanceMapAdapter, SimEventClockTick) | |
| Callback for every clock tick, to run our diff equations in integrate(). | |
| SIMCALLBACK_DECLARE (TaskRelevanceMapAdapter, SimEventSaveOutput) | |
| Callback for every time we should save our outputs. | |
| virtual void | save1 (const ModelComponentSaveInfo &sinfo) |
| Save our internals. | |
| virtual void | reset1 () |
| Get reset. See ModelComponent. | |
| virtual void | inputFrame (const InputFrame &f)=0 |
| Called when a new input frame is available from the Retina. | |
| virtual void | saccadicSuppression (const bool on)=0 |
| Some TRM implementations will reset their memory upon saccade. | |
| virtual void | integrate (SimEventQueue &q)=0 |
| Integrate for one time step. | |
Protected Attributes | |
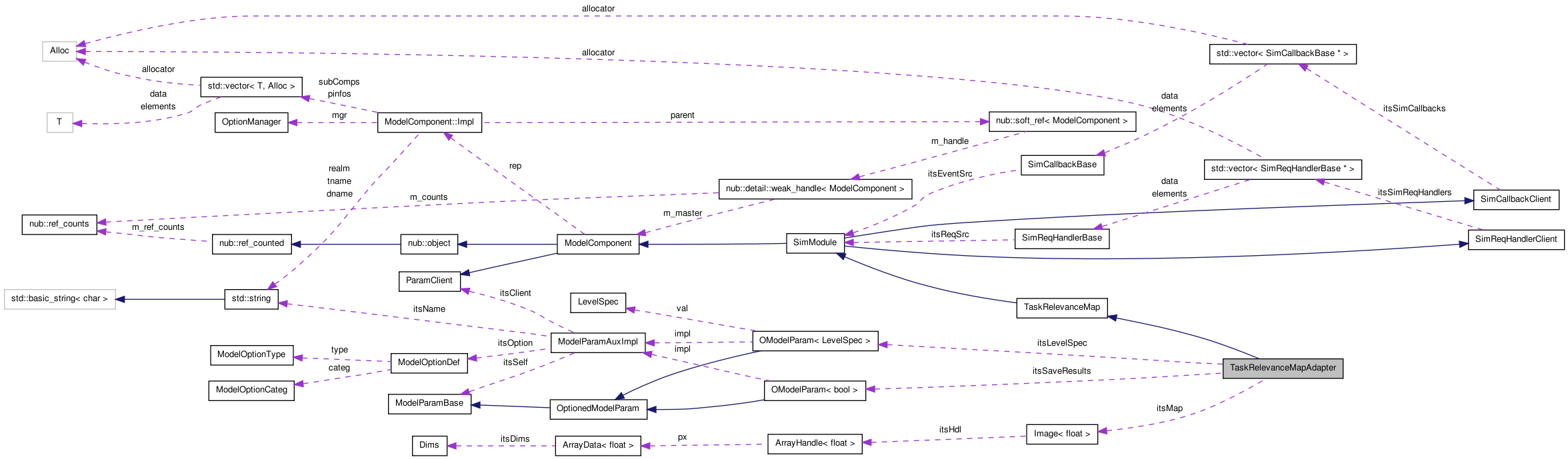
| OModelParam< LevelSpec > | itsLevelSpec |
| LevelSpec for scale of saliency map. | |
| OModelParam< bool > | itsSaveResults |
| Save our internals when saveResults() is called? | |
| Image< float > | itsMap |
| This map contains the relevance values. | |
Partial implementation of TaskRelevanceMap for further derivation.
Definition at line 151 of file TaskRelevanceMap.H.
| TaskRelevanceMapAdapter::TaskRelevanceMapAdapter | ( | OptionManager & | mgr, | |
| const std::string & | descrName, | |||
| const std::string & | tagName | |||
| ) |
Constructor.
Definition at line 189 of file TaskRelevanceMap.C.
| TaskRelevanceMapAdapter::~TaskRelevanceMapAdapter | ( | ) | [virtual] |
Destructor.
Definition at line 202 of file TaskRelevanceMap.C.
| virtual void TaskRelevanceMapAdapter::inputFrame | ( | const InputFrame & | f | ) | [protected, pure virtual] |
Called when a new input frame is available from the Retina.
Implemented in TaskRelevanceMapStd, TaskRelevanceMapKillStatic, TaskRelevanceMapKillN, TaskRelevanceMapGistClassify, TaskRelevanceMapTigs, TaskRelevanceMapTigs2, and TaskRelevanceMapSocial.
| virtual void TaskRelevanceMapAdapter::integrate | ( | SimEventQueue & | q | ) | [protected, pure virtual] |
Integrate for one time step.
Implemented in TaskRelevanceMapStd, TaskRelevanceMapKillStatic, TaskRelevanceMapKillN, TaskRelevanceMapGistClassify, TaskRelevanceMapTigs, TaskRelevanceMapTigs2, and TaskRelevanceMapSocial.
| void TaskRelevanceMapAdapter::reset1 | ( | ) | [protected, virtual] |
Get reset. See ModelComponent.
In the adapter, we just free itsMap.
Reimplemented from ModelComponent.
Reimplemented in TaskRelevanceMapKillStatic, TaskRelevanceMapKillN, TaskRelevanceMapGistClassify, TaskRelevanceMapTigs, TaskRelevanceMapTigs2, and TaskRelevanceMapSocial.
Definition at line 206 of file TaskRelevanceMap.C.
References Image< T >::freeMem(), and itsMap.
| virtual void TaskRelevanceMapAdapter::saccadicSuppression | ( | const bool | on | ) | [protected, pure virtual] |
Some TRM implementations will reset their memory upon saccade.
Implemented in TaskRelevanceMapStd, TaskRelevanceMapKillStatic, TaskRelevanceMapKillN, TaskRelevanceMapGistClassify, TaskRelevanceMapTigs, TaskRelevanceMapTigs2, and TaskRelevanceMapSocial.
| void TaskRelevanceMapAdapter::save1 | ( | const ModelComponentSaveInfo & | sinfo | ) | [protected, virtual] |
Save our internals.
This implementation just saves the map with a file name prefix of "TRM".
Reimplemented from ModelComponent.
Reimplemented in TaskRelevanceMapKillStatic, TaskRelevanceMapTigs, and TaskRelevanceMapTigs2.
Definition at line 261 of file TaskRelevanceMap.C.
References FLOAT_NORM_PRESERVE, OModelParam< T >::getVal(), itsMap, itsSaveResults, and SRC_POS.
| TaskRelevanceMapAdapter::SIMCALLBACK_DECLARE | ( | TaskRelevanceMapAdapter | , | |
| SimEventSaveOutput | ||||
| ) | [protected] |
Callback for every time we should save our outputs.
| TaskRelevanceMapAdapter::SIMCALLBACK_DECLARE | ( | TaskRelevanceMapAdapter | , | |
| SimEventClockTick | ||||
| ) | [protected] |
Callback for every clock tick, to run our diff equations in integrate().
| TaskRelevanceMapAdapter::SIMCALLBACK_DECLARE | ( | TaskRelevanceMapAdapter | , | |
| SimEventSaccadeStatusEye | ||||
| ) | [protected] |
Callback for when a new eye activity is going on.
| TaskRelevanceMapAdapter::SIMCALLBACK_DECLARE | ( | TaskRelevanceMapAdapter | , | |
| SimEventRetinaImage | ||||
| ) | [protected] |
Callback for when a new input frame is available from the retina.
OModelParam<LevelSpec> TaskRelevanceMapAdapter::itsLevelSpec [protected] |
LevelSpec for scale of saliency map.
Definition at line 176 of file TaskRelevanceMap.H.
Referenced by TaskRelevanceMapSocial::inputFrame().
Image<float> TaskRelevanceMapAdapter::itsMap [protected] |
This map contains the relevance values.
The TaskRelevanceMap adapter will initialize this to the correct size and all-ones as soon as an input frame is received. As long as itsMap is not initialized, derived classes should just do nothing. Derived classes should update itsMap with the new computed relevance values, as this is the one which will get saved, displayed, posted, etc.
Definition at line 208 of file TaskRelevanceMap.H.
Referenced by TaskRelevanceMapKillStatic::inputFrame(), TaskRelevanceMapSocial::inputFrame(), TaskRelevanceMapKillN::integrate(), TaskRelevanceMapTigs2::integrate(), TaskRelevanceMapGistClassify::integrate(), TaskRelevanceMapTigs::integrate(), reset1(), and save1().
OModelParam<bool> TaskRelevanceMapAdapter::itsSaveResults [protected] |
Save our internals when saveResults() is called?
Definition at line 179 of file TaskRelevanceMap.H.
Referenced by TaskRelevanceMapTigs::save1(), save1(), TaskRelevanceMapKillStatic::save1(), and TaskRelevanceMapTigs2::save1().
 1.6.3
1.6.3