
#include "Component/ModelManager.H"#include "Component/OptionManager.H"#include "Controllers/PID.H"#include "Devices/FrameGrabberConfigurator.H"#include "Devices/sc8000.H"#include "GUI/XWinManaged.H"#include "Image/ColorOps.H"#include "Image/CutPaste.H"#include "Image/DrawOps.H"#include "Image/Image.H"#include "Image/MathOps.H"#include "Image/Pixels.H"#include "Image/ShapeOps.H"#include "Image/Transforms.H"#include "Image/fancynorm.H"#include "Neuro/SaliencyMap.H"#include "Neuro/VisualCortex.H"#include "Neuro/WTAwinner.H"#include "Neuro/WinnerTakeAll.H"#include "RCBot/Motion/MotionEnergy.H"#include "Raster/Raster.H"#include "Transport/FrameIstream.H"#include "Util/Timer.H"#include "Util/Types.H"#include "Util/log.H"#include <math.h>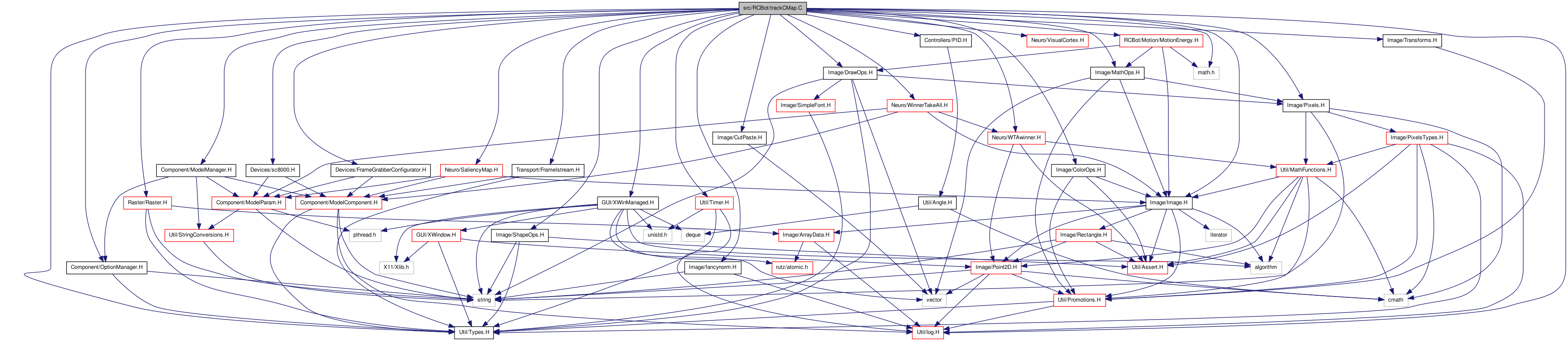
Go to the source code of this file.
Defines | |
| #define | UP_KEY 98 |
| #define | DOWN_KEY 104 |
| #define | LEFT_KEY 100 |
| #define | RIGHT_KEY 102 |
| #define | sml 0 |
| #define | delta_min 3 |
| #define | delta_max 4 |
| #define | level_min 0 |
| #define | level_max 2 |
| #define | maxdepth (level_max + delta_max + 1) |
| #define | normtyp (VCXNORM_MAXNORM) |
Functions | |
| Image< float > | ComputeCMAP (const Image< float > &fimg, const PyramidType ptyp, const float ori, const float coeff, Point2D< int > &p, float *bias, bool find_bias) |
| int | main (int argc, char **argv) |
Variables | |
| XWinManaged | window (Dims(256, 256),-1,-1,"Test Output 1") |
| XWinManaged | window1 (Dims(256, 256),-1,-1,"S Map") |
| XWinManaged | window2 (Dims(256, 256),-1,-1,"S Map") |
track featuers
Definition in file trackCMap.C.
 1.6.3
1.6.3