
#include "Beobot/Beobot.H"#include "Beobot/beobot-defs.H"#include "Component/ModelManager.H"#include "Devices/DeviceOpts.H"#include "Devices/FrameGrabberConfigurator.H"#include "Devices/RadioDecoder.H"#include "GUI/XWindow.H"#include "Image/Image.H"#include "Image/Pixels.H"#include "Image/fancynorm.H"#include "Transport/FrameIstream.H"#include "Util/Types.H"#include <cmath>#include <netdb.h>#include <signal.h>#include <unistd.h>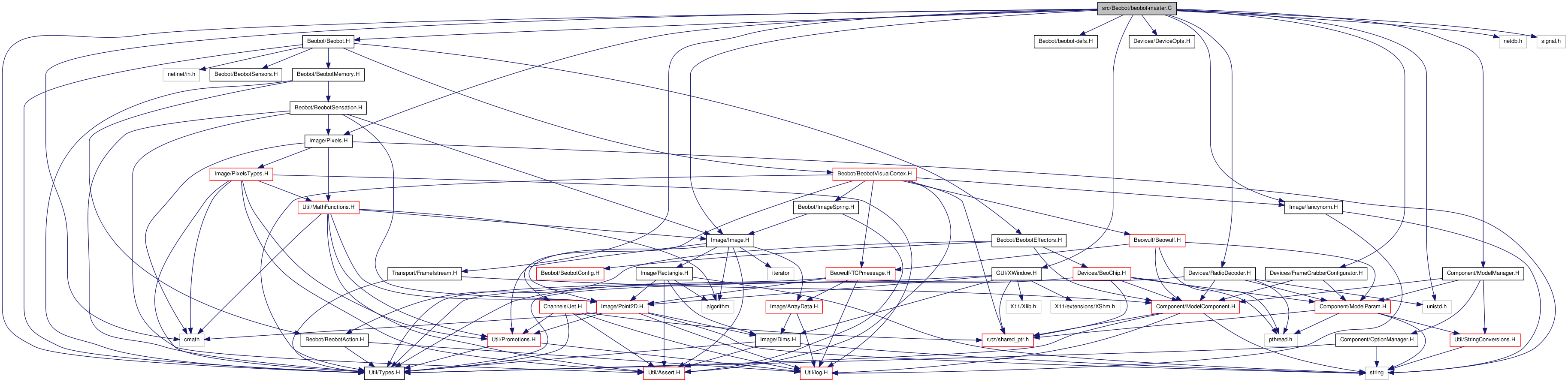
Go to the source code of this file.
Defines | |
| #define | SLAVES "bb1ag:9790 bb1bg:9789 bb1bg:9790" |
| Names of the beowulf slaves (default port is 9789). | |
| #define | NBAVG 10 |
| Number of frames over which to compute average stats: | |
| #define | NBSTATS 6 |
| Number of stats to collect: | |
| #define | USE_SINGLE_CPU 0 |
| define this to use only one cpu | |
Functions | |
| void | terminate (int s) |
| Signal handler (e.g., for control-C). | |
| int | main (const int argc, const char **argv) |
Variables | |
| static bool | goforever = true |
| Will turn false on interrupt signal. | |
main control program for beobots
Definition in file beobot-master.C.
| #define NBAVG 10 |
Number of frames over which to compute average stats:
Definition at line 67 of file beobot-master.C.
Referenced by main().
| #define NBSTATS 6 |
| #define SLAVES "bb1ag:9790 bb1bg:9789 bb1bg:9790" |
Names of the beowulf slaves (default port is 9789).
This parallel vision processing master is for use with beobot-slave.C. See the beobotgo script in bin/ for how to launch the slaves.
Definition at line 64 of file beobot-master.C.
Referenced by main().
| #define USE_SINGLE_CPU 0 |
define this to use only one cpu
Definition at line 72 of file beobot-master.C.
Referenced by main().
| int main | ( | const int | argc, | |
| const char ** | argv | |||
| ) |
radio.zeroCalibrate(); radio.rangeCalibrate();
Definition at line 81 of file beobot-master.C.
References ModelComponent::addSubComponent(), ModelManager::getExtraArg(), ModelManager::getExtraArgAs(), Timer::getReset(), Beobot::getRetinaPtr(), BeobotAction::getSpeed(), BeobotAction::getTurn(), goforever, Point2D< T >::i, Beobot::lowLevel(), Beobot::lowLevelEnd(), Beobot::lowLevelStart(), MYLOGVERB, NBAVG, NBSTATS, ModelManager::parseCommandLine(), Timer::reset(), BeobotAction::setGear(), ModelManager::setOptionValString(), BeobotAction::setSpeed(), BeobotAction::setTurn(), SLAVES, ModelComponent::start(), ModelComponent::stop(), USE_SINGLE_CPU, and VCXNORM_MAXNORM.
| void terminate | ( | int | s | ) |
Signal handler (e.g., for control-C).
Definition at line 77 of file beobot-master.C.
References goforever.
bool goforever = true [static] |
Will turn false on interrupt signal.
Definition at line 74 of file beobot-master.C.
Referenced by main(), and terminate().
 1.6.3
1.6.3