
#include "Robots/LoBot/ui/LoLaserViz.H"#include "Robots/LoBot/config/LoConfigHelpers.H"#include "Robots/LoBot/misc/LoExcept.H"#include "Robots/LoBot/misc/LoTypes.H"#include "Robots/LoBot/misc/factory.hh"#include "Robots/LoBot/util/LoMath.H"#include <GL/gl.h>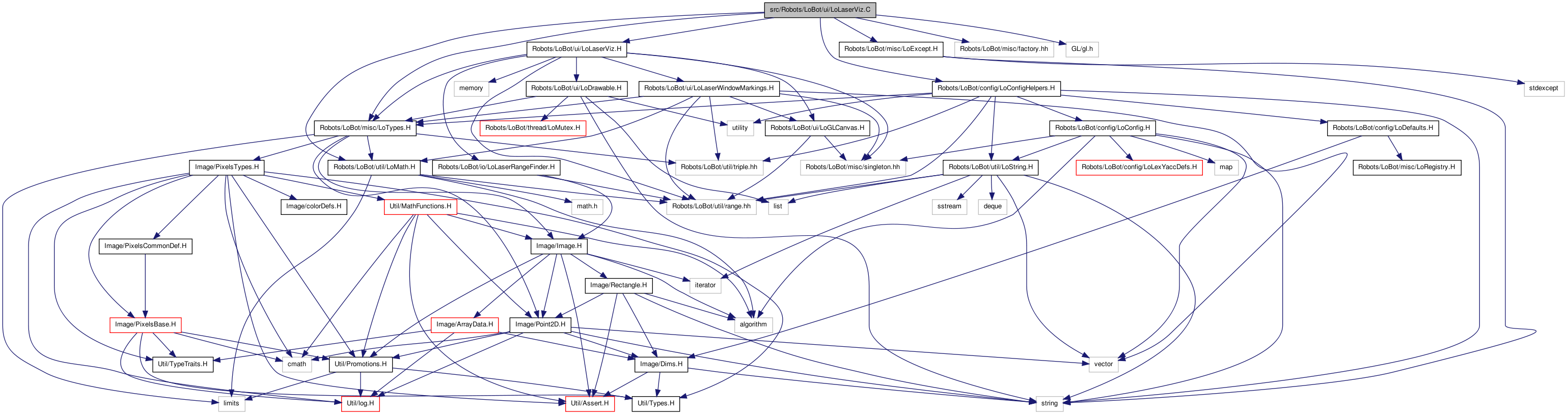
Go to the source code of this file.
Functions | |
| static void | lobot::draw_rays (const LaserRangeFinder *lrf, const range< int > &angles, int step, const GLColor &color) |
| static void | lobot::draw_hull (const LaserRangeFinder *lrf, const range< int > &angles, int step, const GLColor &color) |
| static void | lobot::draw_lrf (float R, const GLColor &color) |
| template<typename T > | |
| static T | lobot::viz_conf (const std::string &key, const T &default_value) |
| template<typename T > | |
| static range< T > | lobot::viz_conf (const std::string &key, const range< T > &default_value) |
| template<typename T > | |
| static triple< T, T, T > | lobot::viz_conf (const std::string &key, const triple< T, T, T > &default_value) |
| template<typename T > | |
| static T | lobot::markings_conf (const std::string &key, const T &default_value) |
This file defines the non-inline member functions of the lobot::LaserViz class used for visualizing the laser range finder measurements.
Definition in file LoLaserViz.C.
 1.6.3
1.6.3