
A stop watch behaviour that measures the time elapsed and quits the high-level controller's application when the count hits zero. More...
#include "Robots/LoBot/control/LoBehavior.H"#include "Robots/LoBot/misc/factory.hh"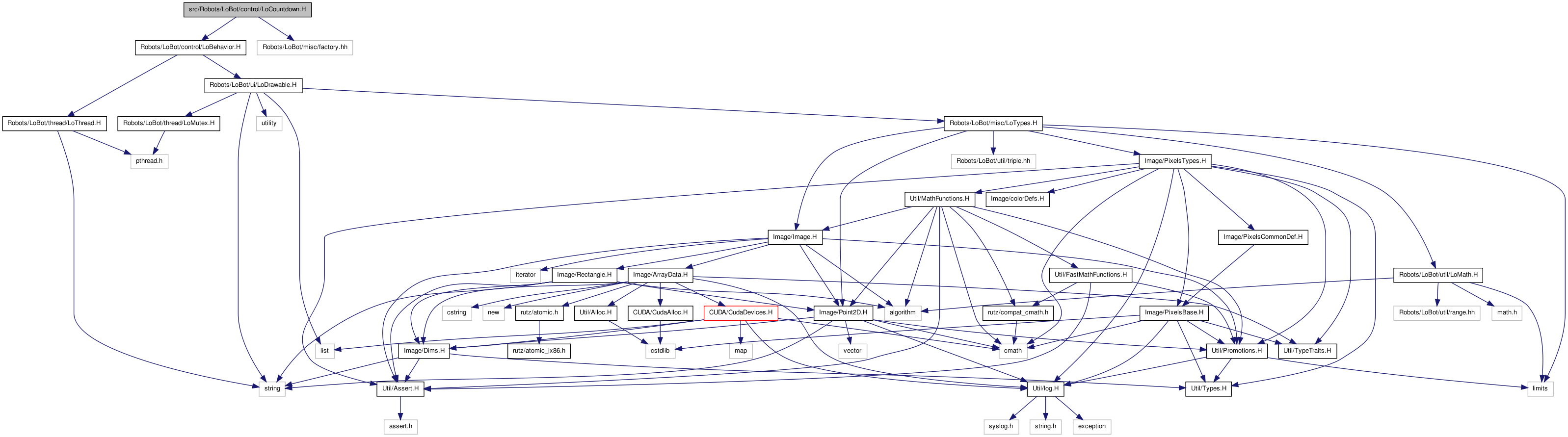
Go to the source code of this file.
Classes | |
| class | lobot::Countdown |
| A "stop watch" behaviour that either pauses the robot or quits the controller application once the counter hits zero. More... | |
A stop watch behaviour that measures the time elapsed and quits the high-level controller's application when the count hits zero.
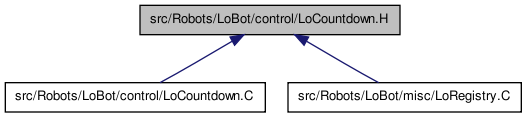
Definition in file LoCountdown.H.
 1.6.3
1.6.3