
#include "Component/ModelManager.H"#include "Devices/BeoChip.H"#include "BeoSub/BeoSubIMU.H"#include "BeoSub/BeoSubBallast.H"#include "Controllers/PID.H"#include <cstdlib>#include <iostream>#include <pthread.h>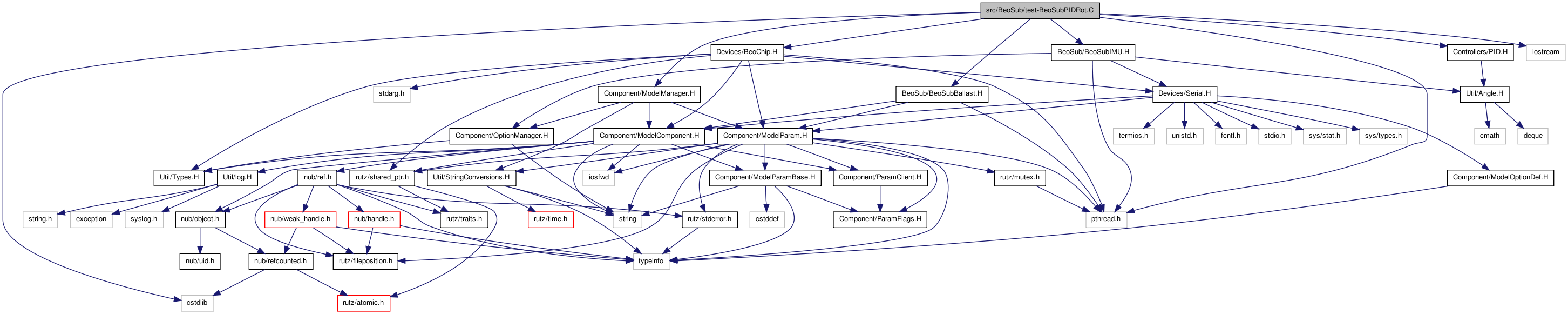
Go to the source code of this file.
Classes | |
| class | IMUListener |
Functions | |
| void | thrust (const float vel, const float delta) |
| int | main (const int argc, const char *argv[]) |
| This program provides basic testing of a BeoSubBallast. | |
Variables | |
| nub::soft_ref< BeoChip > | bc_ptr |
| PID< float > * | pid |
| float | cvel |
| float | cdelta |
| bool | start = true |
test submarine ballasts
Definition in file test-BeoSubPIDRot.C.
| int main | ( | const int | argc, | |
| const char * | argv[] | |||
| ) |
This program provides basic testing of a BeoSubBallast.
Definition at line 93 of file test-BeoSubPIDRot.C.
References ModelComponent::addSubComponent(), ModelManager::getExtraArg(), MC_RECURSE, MYLOGVERB, ModelManager::parseCommandLine(), nub::soft_ref< T >::reset(), ModelComponent::start(), and ModelComponent::stop().
 1.6.3
1.6.3