
#include "Component/ModelManager.H"#include "Image/Image.H"#include "Image/Transforms.H"#include "Image/DrawOps.H"#include "Image/Rectangle.H"#include "Image/MathOps.H"#include "Image/MatrixOps.H"#include "Image/Layout.H"#include "Media/FrameSeries.H"#include "Transport/FrameInfo.H"#include "Raster/GenericFrame.H"#include "Raster/Raster.H"#include "Neuro/BeoHeadBrain.H"#include "Util/Timer.H"#include "GUI/GeneralGUI.H"#include "GUI/ImageDisplayStream.H"#include "GUI/DebugWin.H"#include "GUI/XWinManaged.H"#include "RCBot/Motion/MotionEnergy.H"#include "ArmControl/CtrlPolicy.H"#include "ArmControl/ArmSim.H"#include "ArmControl/RobotArm.H"#include "ArmControl/ArmController.H"#include "ArmControl/ArmPlanner.H"#include "Devices/DeviceOpts.H"#include "Util/MathFunctions.H"#include <unistd.h>#include <stdio.h>#include <signal.h>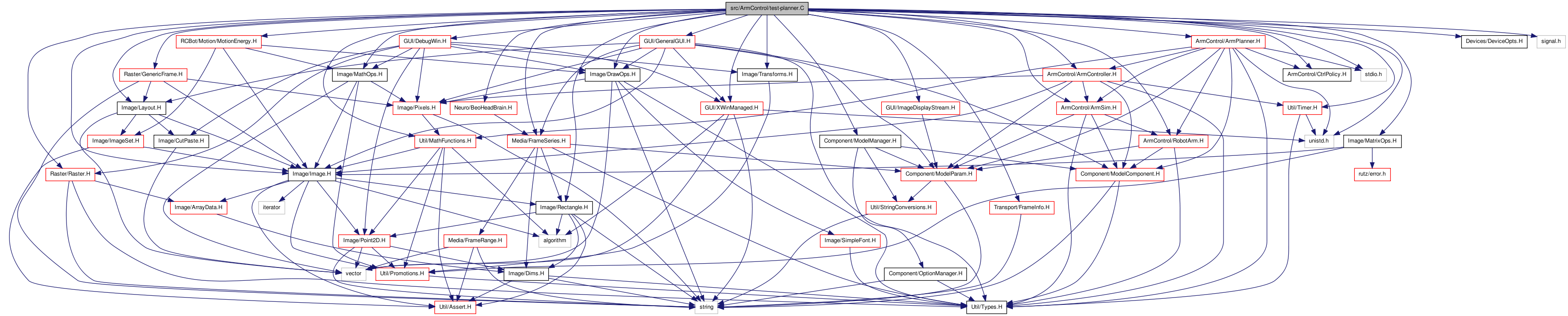
Go to the source code of this file.
Functions | |
| void | terminate (int s) |
| Signal handler (e.g., for control-C). | |
| Point2D< int > | getClick (nub::soft_ref< OutputFrameSeries > &ofs) |
| int | getKey (nub::soft_ref< OutputFrameSeries > &ofs) |
| void | output () |
| void | sync () |
| int | main (const int argc, const char **argv) |
Variables | |
| ModelManager * | mgr |
| nub::soft_ref< Scorbot > | scorbot |
| nub::soft_ref< ArmSim > | armSim |
| nub::soft_ref< ArmController > | armControllerScorbot |
| nub::soft_ref< ArmController > | armControllerArmSim |
| nub::soft_ref< ArmPlanner > | armPlanner |
| nub::soft_ref< BeoHeadBrain > | beoHeadBrain |
| double | desireCup [3] = {-1*1.125/4-0.15,0.15,0.25} |
| double | desireBlock [3] = {-1*1.125/4,0,0.05} |
grab slient objects
Definition in file test-planner.C.
| void terminate | ( | int | s | ) |
Signal handler (e.g., for control-C).
Definition at line 86 of file test-planner.C.
 1.6.3
1.6.3