
#include "Beowulf/Beowulf.H"#include "Component/ModelManager.H"#include "Raster/Raster.H"#include "Image/Image.H"#include "Image/Pixels.H"#include "GUI/XWinManaged.H"#include "Util/Timer.H"#include "Beobot/BeobotControl.H"#include "SIFT/VisualObject.H"#include "SIFT/VisualObjectDB.H"#include "SIFT/Histogram.H"#include "Image/MathOps.H"#include "Image/CutPaste.H"#include "Image/DrawOps.H"#include "Image/ShapeOps.H"#include "Image/MatrixOps.H"#include "Beobot/beobot-GSnav-def.H"#include "Beobot/GSnavResult.H"#include "Beobot/Environment.H"#include "Beobot/GSlocalizer.H"#include <signal.h>#include <errno.h>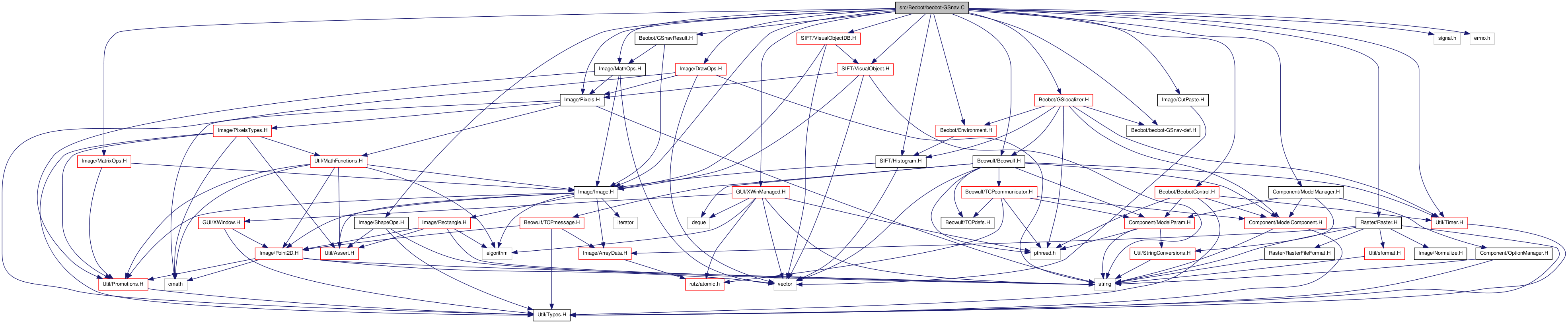
Go to the source code of this file.
Functions | |
| void | getSearchCommand (TCPmessage &rmsg, int32 rframe, int32 raction, bool &resetVentralSearch, Image< PixRGB< byte > > &ima, Image< double > &cgist, std::vector< rutz::shared_ptr< VisualObject > > &inputVO, std::vector< Point2D< int > > &objOffset, std::string saveFilePath, std::string testRunFPrefix, float &dx, float &dy, uint &snumGT, float <ravGT) |
| process the message passed by Visual Cortex | |
| Image< PixRGB< byte > > | getSalImage (Image< PixRGB< byte > > ima, std::vector< rutz::shared_ptr< VisualObject > > inputVO, std::vector< Point2D< int > > objOffset, std::vector< bool > found) |
| display the salient objects passed by Visual Cortex program | |
| Image< PixRGB< byte > > | processLocalizerResults (nub::ref< GSlocalizer > gslocalizer, std::string savePrefix) |
| process the returned search result | |
| Image< PixRGB< byte > > | getDisplayImage (nub::ref< GSlocalizer > gslocalizer) |
| bool | saveGist (std::string saveFilePath, std::string testRunFPrefix, int currSegNum, int count, Image< double > cgist) |
| save gist vector to a file | |
| void | reportResults (std::string savePrefix, uint nsegment) |
| report the results of the trial run | |
| void | reportTrialResults () |
| void | terminate (int s) |
| Signal handler (e.g., for control-C). | |
| int | main (const int argc, const char **argv) |
Variables | |
| static bool | goforever = true |
| Will turn false on interrupt signal. | |
Robot navigation using saliency and gist. Run beobot-GSnav-master at CPU_A to run Gist-Saliency model Run beobot-GSnav at CPU_B to run SIFT
Definition in file beobot-GSnav.C.
| Image< PixRGB< byte > > getSalImage | ( | Image< PixRGB< byte > > | ima, | |
| std::vector< rutz::shared_ptr< VisualObject > > | inputVO, | |||
| std::vector< Point2D< int > > | objOffset, | |||
| std::vector< bool > | found | |||
| ) |
display the salient objects passed by Visual Cortex program
Definition at line 542 of file beobot-GSnav.C.
References drawDisk(), drawRect(), Image< T >::getHeight(), Image< T >::getWidth(), inplacePaste(), sformat(), writeText(), and ZEROS.
| void getSearchCommand | ( | TCPmessage & | rmsg, | |
| int32 | rframe, | |||
| int32 | raction, | |||
| bool & | resetVentralSearch, | |||
| Image< PixRGB< byte > > & | ima, | |||
| Image< double > & | cgist, | |||
| std::vector< rutz::shared_ptr< VisualObject > > & | inputVO, | |||
| std::vector< Point2D< int > > & | objOffset, | |||
| std::string | saveFilePath, | |||
| std::string | testRunFPrefix, | |||
| float & | dx, | |||
| float & | dy, | |||
| uint & | snumGT, | |||
| float & | ltravGT | |||
| ) |
process the message passed by Visual Cortex
Definition at line 581 of file beobot-GSnav.C.
References Image< T >::beginw(), TCPmessage::getElementColByteIma(), TCPmessage::getElementDouble(), TCPmessage::getElementFloat(), TCPmessage::getElementInt32(), Image< T >::getHeight(), Image< T >::getWidth(), NO_INIT, TCPmessage::reset(), Image< T >::resize(), sformat(), and Rectangle::tlbrO().
| Image< PixRGB< byte > > processLocalizerResults | ( | nub::ref< GSlocalizer > | gslocalizer, | |
| std::string | savePrefix | |||
| ) |
process the returned search result
Definition at line 661 of file beobot-GSnav.C.
References Timer::get(), Timer::reset(), sformat(), and Raster::WriteRGB().
| void reportResults | ( | std::string | savePrefix, | |
| uint | nsegment | |||
| ) |
report the results of the trial run
Definition at line 850 of file beobot-GSnav.C.
| void reportTrialResults | ( | ) |
report the results of all the trial runs it's a hack code
Definition at line 865 of file beobot-GSnav.C.
References sformat().
| bool saveGist | ( | std::string | saveFilePath, | |
| std::string | testRunFPrefix, | |||
| int | currSegNum, | |||
| int | count, | |||
| Image< double > | cgist | |||
| ) |
save gist vector to a file
Definition at line 828 of file beobot-GSnav.C.
References Image< T >::beginw(), and Image< T >::endw().
| void terminate | ( | int | s | ) |
Signal handler (e.g., for control-C).
Definition at line 182 of file beobot-GSnav.C.
References goforever.
bool goforever = true [static] |
Will turn false on interrupt signal.
Definition at line 142 of file beobot-GSnav.C.
Referenced by terminate().
 1.6.3
1.6.3